- 提供配置文件
- Biorob实验室原生机器人集团BIRG是EPFL工程学院生物工程学院的一部分计算运动控制 感官协调 学习动物和机器人并取动物启发设计机器人新控法, 以及新机器人在复杂环境中运动敏捷
产品组合
两栖机器人
- 两栖蛇(或像eel/laprey)、salander、Fishs和clipede类机器人这些项目有三重目标:(1)为户外机器人任务搭建两栖机器人,从实生动物启发(2)使用机器人测试基于中心模式生成器概念的新型自适应控制器的床位,(3)使用机器人调查运动控制神经网络如何在实生动物中实现的假设使用中心模式生成模型测试各种运动控件 取材于我们对灯光运动数研究
项目
-

安斐博特:两栖蛇机器人
-
- 项目的目的是搭建生物两栖蛇类机器人,称为AmphiBot项目目标有三重:(1) 搭建两栖机器人执行室外机器人任务,从蛇形长鱼如灯泡中获取启发;(2) 使用机器人测试基于中心模式生成器概念的新型自适应控制器的床位;(3) 使用机器人调查运动控制神经网络如何在实生动物中实现的假设使用中心模式生成模型测试各种运动控件 取材于我们对灯光运动数研究最新一代是安斐博特三世,它可以游速度类似于人,看到友人机器人竞赛视频机器人元素还用作 我们Slamandra机器人二类的脊柱元素
项目目前由Envirobot项目资助,作为swis Nano-Tera程序的一部分这个项目将改善机器人(第四代安斐博特IV)并安装多传感器用于湖中检测污染
-

萨拉曼德式机器人
-
- 并受邀参加2013年3月19日至21日在里昂举行的Innorobo机器人推理
与其前身Salandra机器人a相比(见下文),新机器人游快两倍多,装有折片并搭载强微控制器,可分布计算脊髓网络模型并模拟肌肉特性少数机器人之一,如果不是唯一的机器人,可以游泳、爬行和步行模块设计使我们能够快速改变模式学(例如make它长长、加法或除法腿等模块性还意味着每个模块都有自己的微控制器、电池和电机,因此我们可以拆分机器人的不同部件,它仍然有效这可能对抗损性产生趣味举例说 机器人可以松散身体部分 并仍然能行走
-

鱼类机器人:BoxyBat
-
- 设计并搭建了两栖鱼机器人 能够游泳爬行项目目标双重:(1)机器人以非线性振荡器系统为基础测试机床;(2)机器人用于EPFL交互展览论坛Decouvertes机器人构建使用与 salander机器人Salamandra机器人相同的元素
机器人控制架构围绕中央模式生成器构建,并用非线性振荡器系统实施,像生物对口系统一样,可生成协调节奏活动模式,同时由简单控制参数调节机器人使用CPG模型能够演化和切换各种电机行为,如向前游、向后游、转转转、滚动、上下移和爬行行为由光、接触和水传感器提供的感官输入触发并调控
-

仿佛萨拉曼德机器人:Pleuropot
-
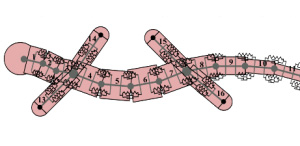
- 介绍像蓝游机器人普来波与我们先前生物启发方法相反,在这一新方法中,我们利用最近在线程学上的进展从生物模拟设计所能提供的好处中受益。三维录制X光摄像头Pleurodeleswaltl,在地上行走,水下行走和游泳跟踪64点动物骨架我们能够记录三维骨移大细节最优化所有记录姿态三题推导机器人需要主动式和被动式关节数和位置三维精度复制动物运动
通过设计Pleurobot提供所有活动关节托盘控件,使我们能够应用神经网络模型脊髓神经电路中心模式生成器激活虚拟肌肉复制记录动物运动和实战粘结性这一点特别重要 以获取基本理解脊椎运动控制
动态系统
- 动态系统与神经科学Biorob
逻辑实验室所学理论方法可大致划分为两个子字段、动态系统与生物建模
项目
-
自适应频振荡器
-
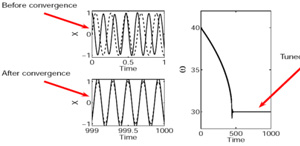
- 面向自适应动态系统的第一个尝试是开发自适应频率振荡器概念,这些振荡器可调整参数学习周期输入信号频率表示它们改变参数 以产生与输入频率对应的内在频率机制超出单纯同步性,因为新频率保留系统编码,即使教学信号消失并用于初始条件
-
动态运动原型
-
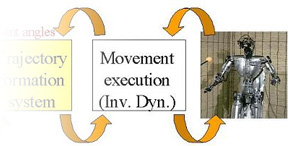
- Stefan Schaal(USC)和Jun Nakanishi(ATR)合作实施该项目,目的是开发控制器学习仿真人形机器人控制器以非线性动态系统为基础,使用局部加权回归技术学习复杂、离散或节奏性运动可视这些控制器为离散或节奏模式生成器,可重放并调节学习运动,同时强力抗扰控制器测试学习一系列运动网球摇动和鼓动)使用人形机器人
控制器还用于虚拟教程项目(与Carolee Winstein协作生物基因学和物理处理系USC),该项目旨在使用动态人形模拟显示并监督中风病人复健演练系统将能够(1) 通过记录物理治疗师显示的动作创建演练数据库2 向病人展示选择演练3 监督病人演练的优劣4 指针并推荐校正5 逐步增加演练难度系统依赖演示和仿真过程,也可以在人形机器人中找到应用
-
可编程中央模式生成器
-
- 中心模式生成器正越来越多地用于控制自动机机器人的移动,从人形机器人到多路象昆虫机器人然而,几乎没有设计方法为具体任务创建CPG大部分时间设计CPG相当困难,因为它的不同参数必须手动或优化算法调整
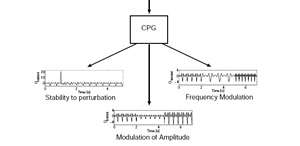
在此项目中,我们研究如何设计泛泛CPG结构,编码周期模式并免费获取通用属性,如稳定抗扰并调频振幅周期模式
主属性我们需要CPG如下:
- 易多层次周期模式编码
- 稳定抗扰动(稳定限周期)
- 易调幅和编码模式频率
- 同步属性(协同其他CPGs、环境或机体动态)
-
林浦里和萨拉曼德建模
-
- 这个项目调查光栅游泳问题,这是最早的脊椎动物之一Orjan Ekeberg研究后,我们开发了神经机学仿真灯塔模拟由神经网络和生物机模型组成)调查中央模式生成器游泳功能项目使用遗传算法自动设计神经网络部分并描述全系统期望行为这种方法有许多趣味性能,既包括计算神经科学-将模型与生物数据相匹配,自动设置参数而非手调参数-和机器人-优化控制器游泳速度或引导转机能力等
中心模式生成模型从灯光启发,目前安斐博特使用,我们两栖蛇/拉普里机器人
人形机器人学
- 人形机器人Biorob
人类机器人学研究四重性
- 控制结构分流和节奏运动
- 学习仿真新轨迹
- 敏捷全体运动
- 共生人机交互穿戴Exskeletons增强
阻塞性运动
项目
-

离散和节奏运动控制架构
-
- 人类能够以强健、看似不费力的方式调整运动以适应近似新环境要解释适配性和强健性,极有希望的视角是模块化生成方法:运动由有限数组稳定运动块组合产生
robotCub项目框架内, 我们开发出架构 生成离散和节奏运动 基于运动原语概念至今为止,我们已经应用此架构执行两项任务:(一)鼓鼓和(二)爬达
-

神经系统控制器
-
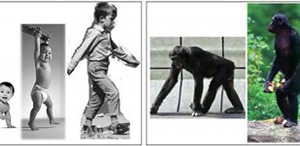
- 双脚主义被认为是早期小猩猩开发的第一个特征之一,比起表兄弟类猿人类的这一独特特征一直令科学家感兴趣,并因此得到了广泛的研究。数十年来,人行模式对研究特别感兴趣,计算机选址和计算功率提高模拟人类行走对生物机理和医学领域特别感兴趣,因为它能洞察四肢假肢设计,提供有关四肢运动的关键信息。
肢体或肢体装置设计也很重要,这些装置用于骨骼和神经肌肉系统修复,通过帮助行人运动使用这些系统(例如:因神经退化性疾病,如多分解或脊髓损伤)或帮助受伤者复健
-
敏捷全体运动
-
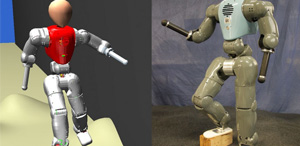
- WALK-MAN是一个四年综合项目,由欧洲联盟委员会通过FP7-ICT-2013-10调用供资项目启动于2013年9月,目标是开发机器人平台(人文形式),该平台可因自然和人为灾难而在实验室空间外非结构化环境工作空间操作
模块机器人学
- 模块机器人实验室
逻辑实验室配有两套硬件Mudularoticic平台客房客和Yamor客房机器人模块设计自组化成变化式、主动式每日环境元素,例如家具碎片多功能性能可以用来组装双腿机器人,像四重机器人(链路模拟结果)。Yamor项目是一个较早项目,以单度自由自足模块和蓝牙散射网通信为主集成时使用插件插件系统Locoform项目目前是一个欧盟项目
项目
-
线变形
-
- Locodraft的主要目标是应用形态和形态概念实现高效强机器人运动和运动,特别是提高自稳定度、能源效率、可操作性并适应未知环境Locoform综合多科方法从生物学、生物机理学、神经科学、机器人学和内含智能调查动物和机器人运动和运动,侧重于两个概念:形态学和变形学
语理学:探索各种形态因素(即形状、质量分布、感官分布、守法性、阻塞性、肢体分割、树干/树形配置、联合几何等)生成新颖和最优机器人设计,提高自稳定度、能源效率(恢复机械能)、可操作性并适应未知环境
摩福斯斯:扩展开发形态概念 通过调查变换即变形学自定义形态能力自定义机器人高技能,使机器人能够提高适应当前任务和环境的适配性非自愿变换也是一个相关问题,因为它可能因伤害或其他外部原因在机器人中发生
-

客房机器人
-
- 由瑞士机器人NCCR资助的项目探索模块机器人设计控制-Croombots家具移动 自组装 自重配置模块机器人由多简单机器人模块组成,可附加并分解(维基百科自重配置模块机器人学)。单元间连接符允许创建任意和变化结构,视任务解决而定与多功能机器人相比,模块机器人提供更高多功能性强抗故障,并有可能自重配置类型假设我们所想 一组客房客 自主连接 形成不同类型的家具凳子、椅子、沙发和表,视用户需求而定家具会随时间变化形状(例如并使用激活接头移动到视用户需要的不同地点非需要时模块群可创建静态结构,如墙或盒子梦想提供多功能模块合并家具,非专业用户和工程师可组合多项应用
-

叶摩尔市
-
- 设计模块机器人单元Yamor项目的目的是创建机器人单元,可快速连接,以创建任意多单元机器人结构开发自适应算法 使用单位间局部交互规则 优化多单元结构的全球行为
Yamor单元有下列特征:
- 单位自主能力 感知 激活 计算
- 由重力服务器驱动 容单可提升3
- 即通过蓝图通信单元间不需要电联)
- 配有FPGA和/或ARM处理器提供弹性计算电量
- 可联通并人工分离 通过螺旋接插件系统 多重方式, 允许我们创建 不同的机器人配置
单元设计为通用性一种我们感兴趣的特殊控制机制是用联带非线性振荡器系统控制单元移动
四重机器人学
项目
-

Cheetah机器人
-
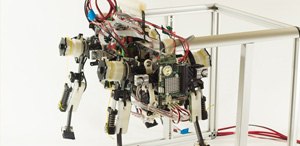
- Cheetah-cub, 兼容四重机器人小小猫或小豹幼崽机器人重1kk和约21cm长达1.42m/s速度,几乎7乘以秒使Cheetah机器人快速运行三重脚下30kg
Cheetah-Cub有几个趣味特征,特别是比照大硬四倍机器人设计1)据我们所知,它是所有三重机器人中最高速低于30kg(从Froude数和体长度乘以秒数计算)。2)它显示自稳定行为 大范围速度开环控3)轻压电源4)廉价易复制、强健安全处理这使得它成为研究多段四重机器人的极佳工具
-
Oncilla机器人
-
- 生物机器人开发新奇适配四重机器人作为FP7欧洲项目的一部分(AMARSi:富机技能自适应模块架构项目2010年3月启动项目48个月)。AMARSi项目的目标是提高机器人运动技能的生物丰富性四重硬件开发是与荷兰根特大学Reservora实验室合作AMARSi项目有10多个项目伙伴
开发出新四大板块 并基于设计 Cheetah-cub机器人 兼容四大机器人Oncilla-robot新特征包括不同的驱动器结构、带联合定位和负载传感器的闭路控制以及机载电源Oncilla-robot继承测试良好的特征,如Cheetah-cub编程设计、三分段段段设计及其电缆驱动段长编译
-
Bobcat机器人
-
- Bobcat机器人设计并实现评估四重绑定机器人内主动脊柱运动效果
机器人独有特征是脉冲安装器,并选择数组弹性激活换个泉水连接RC-servo电机脊柱动画机向机器人投影方向工作,机器人可折曲脊柱成剖分或剖分形状
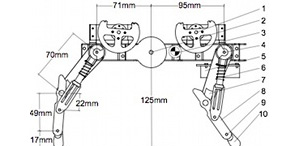
Bobcat机器人腿设计二分制,膝关节加重弹簧双动工双腿讲解a) 臀关节b) 膝关节机器人前后腿完全相同 前后后向后向Bobcat机器人腿长运算与Cheetah机器人完全相同:电缆机制正在积极缩短机器人腿,逐条切取弹簧放在膝关节内 机器人唯一想伸展腿
修复机器人学
-
-
恢复机器人BIOROB
-
- 自2009年以来恢复机器人工作成为BioRob新调查领域目标在于嵌入先进控制技术知识中心模式生成器和优化机器人平台向残疾人提供康复治疗(例如中风病人)和老年人至今为止,我们调查的重点是修复运动(下肢)
缺步者接受强化康复程序后,恢复期望值提高标准复健程序需要一二甚至三位理疗师的密集努力才能转移病人,这对理疗师来说可能也是痛苦的。恢复机器人技术是一个大有希望的研究渠道,可接管部分耗时耗能工作目标不是取代理疗师,而是减轻他任务中最痛苦的方面,最终导致较长和/或更频繁的训练课开发自主康复机器人可能也有助于扩展家庭治疗最后,我们还期望为恢复机器人开发的一些设计方法也可能适应主动假肢设计



















