- 提供配置文件
- 名木实验室由教授创建秋树南木市千叶大学机械工程实验室的目的是开发超人性高速高性能机器人系统其中包括跟踪系统、抓取和处理、动态操作和视觉反馈控制
产品组合
高速多指手
- 提议使用新开发高速手系和高速视觉动态抓取高速手系统新设计动画机为指针提供极佳特征:轻重(约110克/指)并用速度移动指尖达4ms和4N功率,反弹小到高增反馈控制高速运动180deg/0.1s实现高速视觉反馈速率为1KHz时,手能抓取并处理动态移动对象实验结果显示下降对象被高速手捕捉
-
-
-
-
-

动态反射使用高速多指手和高速视觉系统
- 在前多研究中,机器人手很难快速重抓目标,因为运动静态或半静态保持接触状态实现高速重排新策略 即动态重排重排任务通过上传目标并捕捉实现论文显示重裁策略基于视觉反馈和实验结果使用高速多指机器人手和高速视觉系统举个例子说明目标动态重裁,我们选择圆柱并实现实验中的动态重裁任务
-

动态反射使用高速多指手和高速视觉系统
- 在前多研究中,机器人手很难快速重抓目标,因为运动静态或半静态保持接触状态实现高速重排新策略 即动态重排重排任务通过上传目标并捕捉实现论文显示重裁策略基于视觉反馈和实验结果使用高速多指机器人手和高速视觉系统举个例子说明目标动态重裁,我们选择圆柱并实现实验中的动态重裁任务
手动软绳用高速多指手
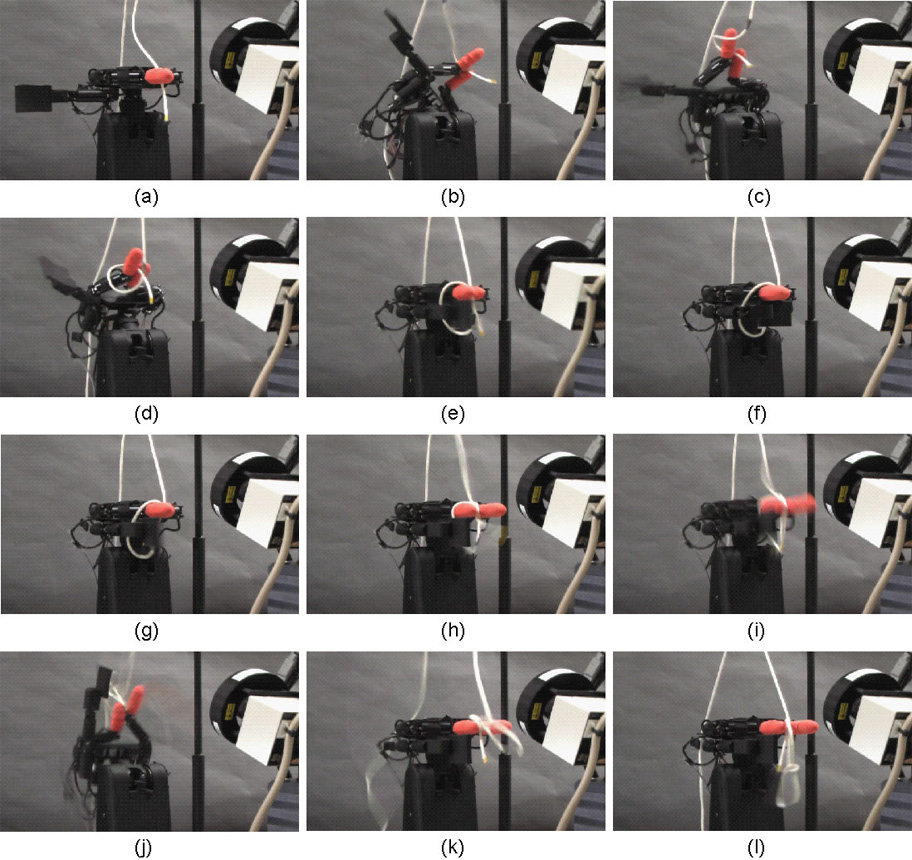
- 研究建议新策略 人手绑定高速多指机器人手感应器 触摸感知感应器策略划分为三步:循环生成、绳子变换和绳子拉动通过这三个步骤,结节仅由多指机器人手实现此外,本研究还提出了手腕合角控制环生成法和绳子变换抓取力控制法
-

高速空调
- 本研究的目标是开发高速人交互机器人技术,机器人读取对手的意图并响应对手运动和人性期望而移动实现此目标时,我们开发空冰球系统使用高速操纵器、高速图像处理法和实时控制系统操纵者可用高速视觉连续图像递归轨迹生成打空曲棍球第一,通过清除图像序列中的噪声测量puck位置第二,puck运动使用递归最小平方估计估计第三,生成臂轨迹是为了维护目标显示实验数据并验证系统有效性
-

高速推送运动基础
- 机器人操作速度目前缓慢,尽管机械系统基本超速运动论文称机器人投送任务实现高速机器人操作策略集中波模式叠加并分析接球控制模式实验结果还显示高速操纵者向目标方向投球
-
高频视觉评分
- 高速视觉系统可处理图像速率为1khz
-

奴隶大师机器人
- 高能奴隶机器人
迭代生存











