


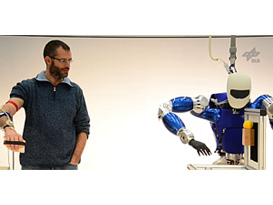








探索其他行星是移动机器人系统的一个重要领域移动机器人可以帮助搜救任务 快速投送图像和地图 评估危急状况公有领域均需在未知粗糙环境内移动导航系统而不依赖外部基础设施空间探索需要一定程度的本地自主处理高通信延迟问题灾难情境中 本地自主令救援人员 免去低级控制此外,使用数个合作系统支持效率和快速响应
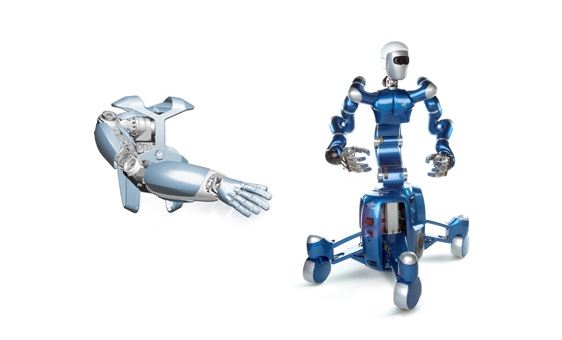
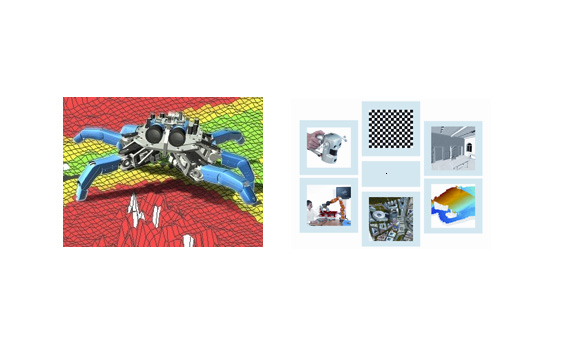
正在研究多copers,rovers和scraps处理这些假设所有系统使用立体视觉惯性测量单元传感器,创建2.5D或3D地图并上载路径规划导航因此,我们的飞地系统能够自主导航用户定义目标点,通过未知粗糙地形而不使用GPS
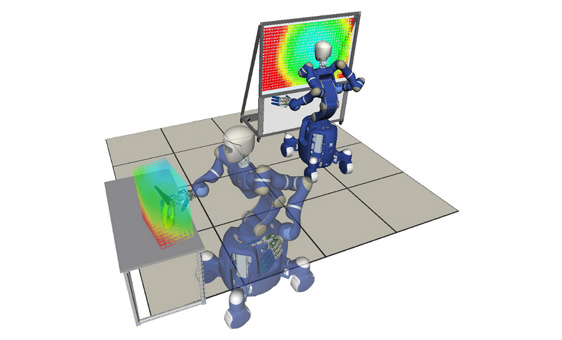
持续工作包括多自主机器人的合作目标是补充多类团队的技能(例如并增强强健性并减少任务时间使用同质团队在任何情况下,每个移动系统都能够自主完成自己的任务,而不必依赖其他系统、中心站、通信链路等


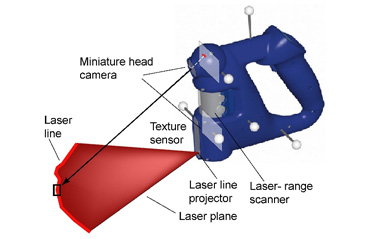
传感器对机器人至关重要RMC开发的传感器对复杂机器人应用需求上升倍感敬重探索、自主3D建模或导航等不同任务需要多功能强视觉感知多重感知3D-Meller使用立体摄像头、激光扫描仪和激光条形剖面器,后来开发出新式激光扫描机VR-SCAN