- 提供配置文件
- KUT生物博学实验室
我们的研究侧重于机器人和生物系统之间的接口,我们的使命是开发这一领域的科学、技术和人力资源。
最近我们感兴趣的是人机故障接口Haptic界面为机电系统,允许人感知并物理操作虚拟或远程环境设计机密接口,提高机密反馈质量,处理延迟网络传输效应,增强虚拟远程操作环境的现实性
Haptic界面在许多领域应用,包括计算机辅助模拟外科手术、自主探索危险或远程环境、海底打捞、赋能技术、微/纳米操作、教育和设计赞助者包括KRF、ADD和MOCIE
由韩国理工大学机械工程学院Jee-Hwan龙教授领导
产品组合
生物启发机器人:人形机器人设计控制
- HumanOIDROBO和ARES
人形机器人Creabo一号、Creabo二号和Creabo三号设计机器人包括servo电机、微处理器控制模块、蓝牙模块、摄像头、铝体、电池和远程控制系统
-

HumanOIDROBOT2
-
HumanOIDROBOT2
移动机器人技术
- 研究中描述并分析数界面移动机器人远程操作
人操作符通过主机命令时 轮式移动机器人远程操作幻影Premium 1.5A来自SensAble技术公司被用作主设备3-DX移动机器人应用控制思想
控制策略
定位速度命令策略用于移动机器人远程操作定位策略期望移动机器人速度由操作大师定位定义位置速度命令机器人位置受主设备位置控制混合命令策略合并定位速度策略
feback信息
优先研究单电传操作对定位速度实验、定位实验和混合指令策略评价
第二,用两种强力反馈研究移动机器人双边远程操作:强力反馈屏障范围信息,强力反馈包括关于机器人状态的信息双边远程操作实验应用不同命令策略
视觉反馈作用也得到验证描述每一种人-机器人交互利弊并描述可能的应用
音频信息还被介绍为远程操作系统可能反馈类型之一声音系统使用通知人操作器机器人前方屏障增强信号强度同时机器人接近屏障声音反馈作用是提供更多远程环境信息,以便降低碰撞概率
主流结果
研究表明根据远程操作器系统应用区不同类型反馈信息的重要性文本反馈对表示机器人状态信息很重要视觉系统可提供远程环境复杂信息力反馈可提供人阻范围信息以防止碰撞附加声音信号很重要,可使用户对远程操作系统状态有更深感知
控制策略是我们研究的另一个目标移动机器人远程操作混合控制策略显示性能更好人操作者可以更容易快速谨慎导航机器人
-
移动机器人:建设检验
- 大型超楼持续健康监控对预防灾难和维护非常重要然而,这些天大多数健康监控方法主要依赖肉眼视觉检验法,并限制在检查员可访问区。并有许多额外问题 因为许多危险工程 大多由人完成
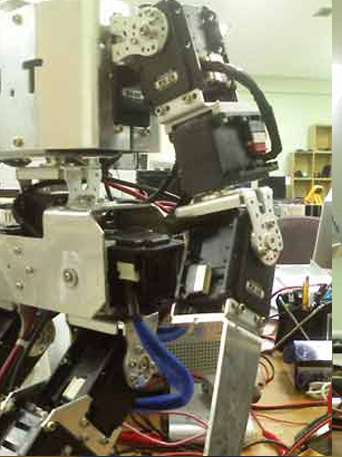
研究中,我们开发出无处不在机器人系统 自主监控超级大楼 解决上述问题
开发机器人系统可爬45度斜墙,可远程操作并拥有无线视频传输通道
主要构件如下:
机载计算机933MHz
无线通信卡
微控件AT90CAN128
4D电机,Maxon60W
4电机驱动器
- 2Servo电机CX-28
USB视频摄像头
电池
-
-
医学机器人:超强ROBOTBILATEREREPERATIONE-ViaINET
- 与Washigton大学生物机器人实验室联合研究项目UW生物博学实验室开发机器人系统RAVEN最小侵入性外科
更多RVEN外科系统信息可见UW生物机器人实验室网站
项目的目标是执行稳定双边远程操作外科机器人人机操作器(Surgeon)正在操纵两个机密主机件控制信号通过互联网发送到外科机器人UDP通信协议使用主机安装在韩国,机器人安装在美国
-

RAVEN-UW生物机器人实验室外科机器人
-
医学机器人:MicleTelerobot用于细胞操作
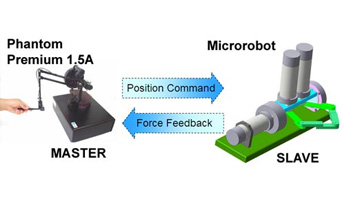
- 项目目标开发机器人系统操作生物机器人实验室与KUT智能系统中心联合研究项目
细胞注入是现代生物工程中常见任务下图显示细胞注入过程变形电池可用于估计和生成力反馈,通过机密设备传递运算符
设计机器人系统 由人通过操纵主机控制位置命令发送到微机器人控制系统,该控制系统与单元格交互作用细胞变形由视觉系统估计 帮助图像识别算法强制反馈应用到基于变形的主设备系统应用强反馈提高细胞注入过程的效率和生产率幻影Primium用作机密主机
并行运动结构选择微机器人有三度主动自由使用带内置齿件和编码器的马达电机受Maxon驱动程序控制,这些驱动程序连接NI运动控制PCI卡运动学下方显示机械结构并显示实机
-
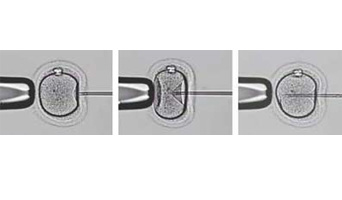
- 微机器人与细胞交互
-
- 并行运动结构选择
-

- 使用带嵌入式齿轮和编码器的马达
-
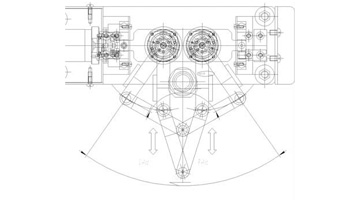
- 微机器人三维自由度
车辆机器人系统VireLissVi
- 这个项目由实验室和贤波公司之间的公司执行我们的主要目标是开发载人无线视觉接口
车辆导航系统现广泛使用视觉信息有助于避免路上交通困难和危险事故
现代车辆摄像系统基于线通信,有几个缺陷安装、配置和修复电线系统既难又难这些问题可以通过应用无线通信技术解决无线部分基于UWB(超广带)技术
-
-














