ETF, University of Belgrade
- Offer Profile
- General interest of ETF (Faculty of Electrical Engineering) Robotics has always been in the field of robot dynamics, design, control and application. Few results that could be considered as pioneering in robotics:
- Computer-aided generation of dynamic equations – world first algorithm based on Lagrange equations,
- World first CAD system for robots,
- Constrained robot motion,
- Distributed positioning for redundant robots,
- Dynamics of robots with elasticity in joints,
- Introducing the new field – robotic handwriting
Product Portfolio
Modeling and simulation of human/humanoid in complex human-like motions including sports
- The mathematical models have been developed to represent and solve the dynamics of any humanoid configuration in any motion task. Particular motions in every-day activities, sports, etc. are considered and solved as special cases of a general theory. Model and software have been checked on bipedal posture stability under disturbances, walking, jumping, handball and basketball actions, soccer, tennis… This work is done within the project Humanoid Robotics – Theory and Application, supported by the Serbian Ministry of Science and Technological Development.
-
Handball action
- presents the results of the simulation of a handball action: the player jumps, catches the ball, swings with the arm, and finally throws the ball.
-
Soccer goalkeeper
- shows a soccer goalkeeper.
Control of the fully anthropomimetic robot
- The recent ETF (Faculty of Electrical Engineering)engagement as a partner in EU-funded FP7 project ECCEROBOT (Embodied Cognition in a Compliantly Engineered Robot) and the role of ETF to provide engineering aspects of control, induced this focus of interests (anthropomimetic robots). The complexity of the control problem lies in the fact that we consider a multi-joint robot imitating human upper body, driven by antagonistic “muscles” with compliance. This means that a joint is driven by a pair of “muscles” acting like agonist and antagonist. Each “muscle” consists, in fact, of a DC motor winding a rope attached to the “bone” thus becoming a tendon. The tendon includes an elastic, expendable element.
-
Structure of the elbow joint
-
Structure of the shoulder rotations (and other joints)
Virtual laboratory for distance learning in Robotics and Mechatronics
- The idea is to allow distance learning in technical disciplines (like Robotics) where the need for laboratory exercises restricted the possibilities. The Virtual Laboratory for Robotics and Machatronics starts from the sophisticated mathematical models of system dynamics to ensure that the virtual system will behave in the same manner as a real one would. Programming interface is identical to the interface used with real systems. The results of dynamic model and simulation are presented and visualized by using diagrams and high-quality animation. The virtual lab not only behaves as a real system and can be watched in work, but offers options not possible or allowed in a real system (overloading, changing motors, changing control concepts, removing robot cover to reveal inner mechanisms in motion, etc.).
-
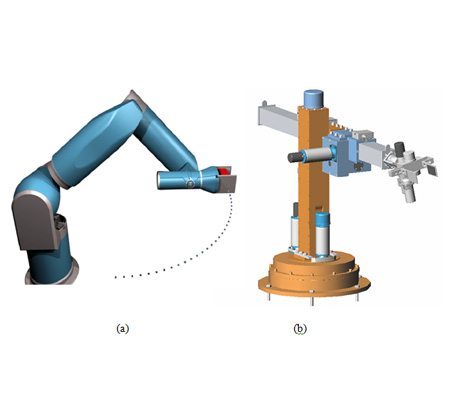
两个机器人目前“present” in the virtual laboratory:
- (a) Jointed configuration
(b) Cylindrical configuration.
-
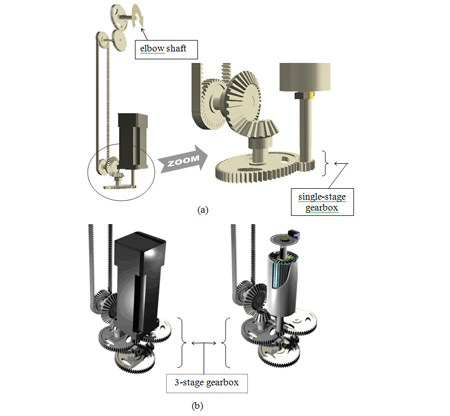
Removed robot cover revealing the inner mechanisms driving the elbow
Robotic Handwriting
- 分布式定位(DP)的概念,previously formulated for robots, was applied to resolve the redundancy problem in handwriting. The DP concept consists in separating the original end-effector motion to slow global and fast local motion and assigning these components to robot joints according to their dynamic capabilities: slow component to massive basic configuration and fast component to light redundancy. In handwriting, the relationship between finger involvement, legibility, and letter inclination was found and the existence of an optimal inclination for a prescribed legibility was proved. Degeneration of handwriting with the progress of fatigue was shown. Robotic assistance to correcting the handwriting disorders was seen as the final target.
-
Configuration (structure) of the writing mechanism with five DOFs.
-
Coordinated motion of fingers produces two translations
-
Relationship between the finger involvement (IKI), inclination of writing (α), and legibility (Le) – optimal inclination leads to minimum finger involvement
-
Degeneration of handwriting with the progress of fatigue












