- 提供配置文件
- 移动多机器人系统
移动机器人
水下机器人
逆运动学与冗余机械手
工业机器人辨识与控制“,
合作的操纵者
交互控制
产品组合
移动多机器人系统
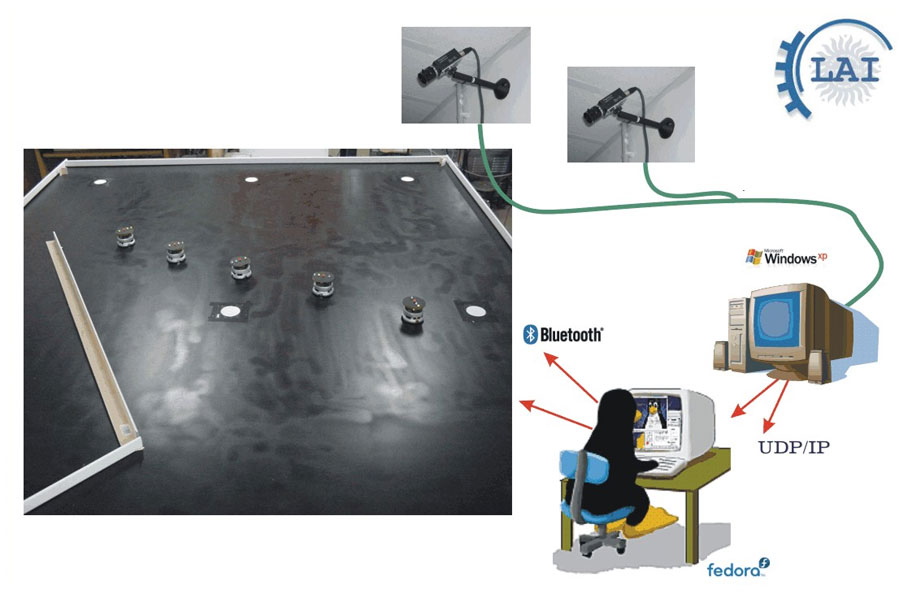
- 在过去的几年中,多机器人系统的合作与协调一直是研究的重点。其基本思想是,多机器人系统可以比单个机器人更有效地执行任务,或者可以完成单个机器人无法执行的任务。此外,多机器人系统具有增加对可能的车辆故障的容忍度、提供任务执行的灵活性或利用分布式传感和驱动等优点。车队的使用在许多应用中都有兴趣,如探索未知环境、导航和编队控制、排雷、物体运输,直到进行团队游戏(如足球);这些可能涉及地面、空中、水下或水面交通工具。提出了一种基于行为的,即基于零空间的行为方法(NSB)来指导移动机器人队列。该方法使用基于层次结构的逻辑来组合多个冲突任务,能够根据每个任务在层次结构中的位置完成或部分完成每个任务。NSB已经在不同类型的机器人(即移动机器人、水下机器人和水面舰艇)上进行了广泛的研究和模拟,同时完成了一些编队控制任务。此外,它已被用于控制由7个Khepera II移动机器人(由K-Team制造)组成的自动地面车辆排。
移动机器人
- 将实时轨迹规划算法应用于I-Robot公司生产的类独轮车移动机器人Magellan-pro上进行了实验。在运动学约束(有限速度和加速度)方面,所期望的路径必须保持尽可能长的时间。模糊推理系统对路径信息进行处理,使车辆在接近窄带时能够做出减速等安全行为。实验concernig
利用移动机器人Magellan-pro和移动机器人Khepera II (K-team制造)进行了基于最小二乘技术的里程测量校准。
水下机器人
- 水下机器人是一项具有挑战性的任务,因为它意味着在非结构化环境中控制非线性系统。在存在操纵器的情况下,必须考虑到系统的冗余。水下机器人系统的运动学控制、动态控制和交互控制一直是我们研究的对象。自主水下航行器(AUV)系统仿真软件包已经开发完成。在ASL实验室进行了AUV动态控制和容错控制的实验。在此基础上,设计了一种自动水下机器人实时路径规划和避障导航系统。
逆运动学与冗余机械手
- 机器人的控制动作自然地在关节空间中执行,而机器人的运动则在任务空间中指定。然后需要求解逆运动学问题;也就是说,给定末端执行器轨迹,找到相应的关节轨迹。针对冗余和非冗余应用、运动学关节极限、奇异点、水下应用、不同的方向表示,研究了许多逆运动学算法,并在PRISMA实验室进行了实验验证。提出了一种用于机器人机械手实时运动学控制的奇异-鲁棒任务优先冗余分辨率。
工业机器人辨识与控制“,
- 为了提高工业机器人传统控制器(即分散式PD关节控制器)的效率,已经实现了一些理论和实验研究(在COMAU Robotica实验室,PRISMA实验室和鲁汶大学PMA分部),以测试先进的控制方案。应用辨识技术对工业机器人进行了动态参数和载荷参数的估计。
合作的操纵者
- 与单臂设计相比,多个机械手系统的协调可以提供更强的能力。在PRISMA实验室进行了运动学控制和操作空间控制的理论研究和实验测试。
交互控制
- 在实际操作任务中,机器人末端执行器与环境的相互作用是有意义的。已经进行了理论和实验工作(在PRISMA实验室),从而制定了并行控制方法。
移动自组织网络(MANET)
-
-
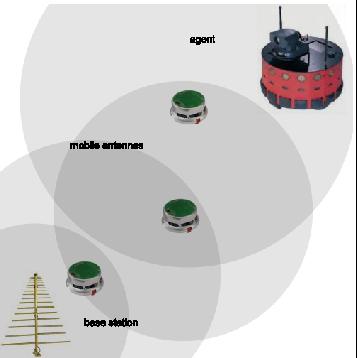
- NSB最近已扩展到对移动自组织网络(MANET)的控制,即使用一组移动机器人携带若干中继天线,以保证救援操作员(人类或机器人)与固定基站之间的持续通信。这些移动天线适当移动以动态确保多跳通信链路,尽管存在障碍、信号衰落区域和管理故障情况(例如,一个或多个移动天线故障)。
其他活动
- 为了解决电力系统电压波形的调节问题,必须考虑到电力系统运行条件由于世代、负荷和网络拓扑的变化而不断发生不可预测的变化。该问题的有效解决方案是采用基于自适应控制的方法设计电压调节器,其中针对不同的电力系统运行条件,研究并实现了卡尔曼滤波技术、不同的识别程序和极点配置控制。



