类别
自动化
21日xx
大厅地图/类别
大厅05
以前的
...东北大学
S14系列:千叶大学
卡西诺大学……
下一个
以前的
下一个
导航:
EXPO21XX
>
自动化21 xx
>
H05:大学和机器人研究
>千叶大学
千叶大学
概述
业务概况
详细联系方式
网站
发送电子邮件
分享:
视频
载入播放器…
提供配置文件
千木实验室由千木昭夫教授创立,隶属于千叶大学机械工程系。该实验室的目的是开发一种超越人类的高速、高性能机器人系统。这包括跟踪系统,抓取和处理,动态操作和视觉反馈控制。
产品组合
高速多点手
提出了一种利用新开发的高速手系统和高速视觉进行动态抓取的方法。在高速手系统中,新设计的执行器为手指提供了优异的特性:重量轻(每指约110g),指尖移动速度约4m/s,功率4N,齿隙小,可进行高增益反馈控制。实现了180°g/0.1s的高速运动。手具有1KHz的高速视觉反馈,可以抓取和处理动态移动的物体。给出了用高速手抓住坠落物体的实验结果。
更多信息
高速多指手动态抓取与高速视觉系统
在以往的大多数研究中,由于机器人手的运动是静态或准静态的,且保持接触状态,所以很难快速抓取目标。为了实现高速再抓取,我们提出了一种新的策略——动态再抓取。在这种策略中,重新抓取任务是通过将目标抛起并抓住它来实现的。本文给出了基于视觉反馈的重抓策略,并给出了高速多指机械手和高速视觉系统的实验结果。作为动态抓取目标的例子,我们选取了一个圆柱体,并在实验中实现了动态抓取任务。
高速多指手动态抓取与高速视觉系统
在以往的大多数研究中,由于机器人手的运动是静态或准静态的,且保持接触状态,所以很难快速抓取目标。为了实现高速再抓取,我们提出了一种新的策略——动态再抓取。在这种策略中,重新抓取任务是通过将目标抛起并抓住它来实现的。本文给出了基于视觉反馈的重抓策略,并给出了高速多指机械手和高速视觉系统的实验结果。作为动态抓取目标的例子,我们选取了一个圆柱体,并在实验中实现了动态抓取任务。
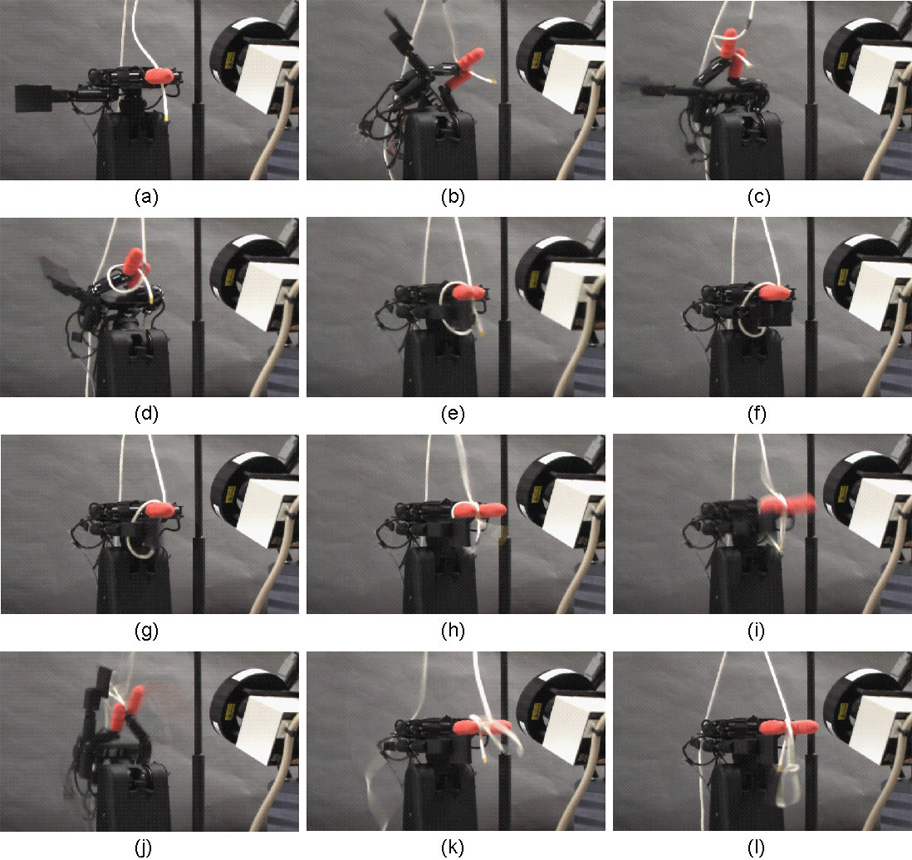
单手用高速多指手打结柔性绳
本研究提出了一种利用高速多指机器人手及触觉和视觉传感器的单手打结新策略。该策略分为三个步骤:环生产,绳索排列,绳索拉。通过这三个步骤,只需要一只多指的机器人手就可以完成打结。此外,本文还提出了制环时手腕关节角度的控制方法和绳排列时抓力的控制方法。
高速空气曲棍球
本研究的目标是开发一种高速人机交互机器人技术,该机器人能够读取对手的意图,并根据对手的动作和人类的目的期望做出相应的动作。为此,我们开发了一个采用高速机械手、高速图像处理方法和实时控制系统的空气冰球系统。该机械臂利用高速视觉的连续图像递归生成轨迹,实现冰球运动。首先,通过去除图像序列中的噪声来测量冰球的位置。其次,采用递归最小二乘估计方法对冰球运动进行估计。第三,生成手臂的运动轨迹,用于防守目标。然后给出了实验数据,验证了系统的有效性。
基于波传播的高速投掷运动
虽然机械系统在运动速度上具有本质优势,但目前机器人的操作速度较慢。为了实现机器人的高速操作,本文采用了机器人投掷任务。我们提出了一种侧重于波型叠加的策略。此外,对球控的接触模型进行了分析。给出了高速机械臂向目标方向抛球的实验结果。
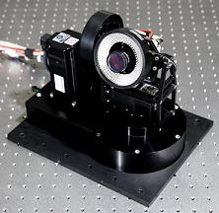
高速视觉伺服
利用高速视觉系统进行视觉伺服,可以1khz的速度处理图像
主从机器人
大功率奴隶机器人
Telexistence
大厅地图/类别
大厅05
以前的
...东北大学
S14系列:千叶大学
卡西诺大学……
下一个
以前的
下一个