类别
自动化
21日xx
会堂图/类别
大厅05
以前的
...麻省理工学院
E1:布里斯托机器人实验室
慕尼黑工业大学
下一个
以前的
下一个
导航:
EXPO21XX
>
自动化21 xx
>
H05:机器人大学和研究
布里斯托机器人实验室
布里斯托机器人实验室
概述
业务概况
详细联系方式
网站
发送电子邮件
分享:
视频
加载播放器…
提供配置文件
我们的使命是了解机器人和嵌入式智能的科学、工程和社会角色。我们的多学科方法旨在创造能够独立工作、相互协作或与人类社会中的我们一起工作的自主设备。
布里斯托机器人实验室于2005年12月启动,是由布里斯托大学、西英格兰大学和HEFCE资助的合作研究伙伴关系。在Chris Melhuish教授的指导下,该实验室是智能自主系统实验室(IAS)的演变。
产品组合
项目
能源自主:生态机器人
我们的工作目标之一是建造能量自主机器人。为此,微生物燃料电池(MFC)技术被用于从精制食品(如糖)和未精制食品(如昆虫和水果)中提取电能。这是通过从微生物代谢过程中提取电子来实现的。为了实现真正的自主,机器人需要在它们的行为技能中加入搜索、收集和消化食物的动作。机器人将被设计成保持不活动状态,直到产生足够的能量来完成下一个任务。这可能被证明是行为选择机制设计方式的范式转变。
项目代号:“生态机器人”。
到目前为止,已经开发了两个这样的机器人,即EcoBot-I和EcoBot-II,它们在某种程度上表现出这种类型的行为。2002年开发的EcoBot-I使用大肠杆菌,并以糖为饲料;2004年开发的EcoBot-II使用污泥微生物,并以死昆虫和食物垃圾(以及其他基质)为饲料。
这个项目使用了同样的MFC技术,也在研究基于人工腮的水下自主机器人。
生态机器人III项目:能源自治
生态机器人III是EPSRC资助的项目,于2007年1月结束。该项目的主要目标是开发一种具有机载流体循环的机器人,能够从环境中收集能量并处理自身废物;所有这些功能都是由mfc驱动的。由于这个项目具有挑战性,快速原型技术被充分利用,以生产一个独特的设计,轻质和坚固的机器人结构,包括多个部分。此外,由于机载能源的稀缺,该团队被要求开发超低功耗电子电路来操作机器人。
右边的图片显示了目前的生态机器人团队。
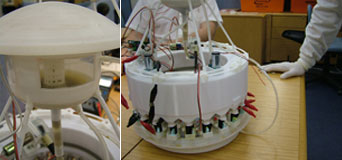
摄食/消化/消化管(左图)
这是机器人的最上层组成部分,由吞食、人工消化和固体废物排泄机构组成。该图像清楚地显示了容器内的污泥和沉积到egster的固体废物。
污泥和水的分布及mfc(右图)
这是机器人的中间部分,由污泥分配机构(白色固体螺旋环)和mfc(共24个)组成,在分配机构的下方显示。在mfc下面有一个溢出收集托盘,反馈到上面的摄入容器。
迈向类人类的共情
这个项目是关于情感表达代理的可信度。其目的是在类人机器人的头部产生面部行为,这样如果一个人与机器人说话,这个人就会感到以同情的方式被倾听。在本研究中,我们将研究人类动态面部表情的分类技术,并在机器人中生成适当的动态表情。这将需要“心智理论”模型以及动态情感模型。我们正在与计算机图形专家合作,他们能够从图像中提取“特征”特征,并使用这些特征创建具有与示例集定性相同行为的新颖动作序列。我们特别感兴趣的是,一个人在缺乏“真正的”智力的情况下,如何以及在多大程度上实现心理关注和理解的幻觉。我们的目标是找到新的方法,通过产生真实的、非重复的面部行为来增强人类的相似性,这种行为可以传达某种潜在的情绪状态。
机器人手势
这个项目的重点是由拟人化的机器人产生可信的对话手势。人类与机器人互动的一个重要部分是,对人类来说,他们有一种与智能代理互动的感觉;实现这一目标的一种方法可能是制造一个既使用手势又使用语音的机器人。手势是人类交流中不可分割的一部分,不仅是语义内容,也是说话者思维过程和对话伙伴参与的证据。这将需要一个能够产生类似人类运动的控制器,为了做到这一点,将这种进化策略应用到神经网络上,作为生成这样一个控制器的一种方式正在被研究。手势本身及其与语音的协调将使用带有手势生成器(NLGG)的新型自然语言生成。NLGG将提供将由进化控制器执行的指令。特别有趣的是,手势如何影响一个人与机器人的互动以及对机器人的感觉。我们将与心理学家合作开展这样的调查,最初使用隐藏的远程呈现控制(绿野仙踪),最终使用完全实现的系统。
触觉传感
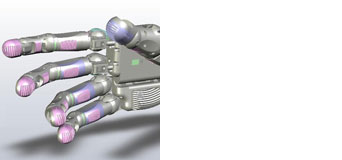
机器人人形手研究
为了与人类以及他们所生活的非结构化环境进行物理互动,机器人将需要精确而复杂的触觉。本课题是研究和设计一种具有触觉仪器的类人机械手。
我们用我们的触觉与他人和环境互动。有人说,在所有的感官中,如果失去触觉,对一个人的生活质量影响最大。由于触觉的缺失,人类不再能够在没有显著视觉反馈和努力的情况下控制物体,甚至是自己的四肢,同时也失去了与他人进行有意义的身体互动和交流的能力。触觉是自主独立存在的重要组成部分,在人与人之间的情感互动中起着重要作用。
将为机械手开发的多模态触觉传感器将允许精确控制和操纵物体,以及在非结构化环境中主动收集物体触觉信息的能力。这项工作还将研究这种仪器手在高级义肢中的使用,以及在人类与机器人的交互中,准确的触觉在安全方面起着重要作用。
触觉表现项目
该项目旨在利用人工手指获得的摩擦学(摩擦)数据产生纹理概念。长期目标是让人工手探索环境,学习和分类遇到的不同纹理。在实现这一目标之前,人造手指上的纹理概念生成和获取技术正在开发中,使用专门用于检查纹理特征的人造纹理。
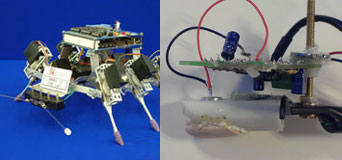
我们的手指(右图)
手指是用聚碳酸酯塑料制作的,使用的是快速原型机。手指后部嵌有一个麦克风,用于记录与物体表面接触时的振动,因为手指嵌有麦克风,采集到的环境噪声水平就降低了。为了提高信噪比,前置放大器被放置在离麦克风尽可能近的地方,这就导致了与手指直接接触的非常强的信号。
初步试验证明,裸塑料材料在与表面接触时没有足够的摩擦或变形,无法充分记录摩擦学数据。为了提高录音质量,他们在手指外侧添加了乳胶皮肤。
群集机器人系统中的学习
本课题的目标是设计一个具有理想群体行为的群集机器人系统。我们通过在团队中引入学习能力来实现这一目标。我们感兴趣的是让个体机器人学会与彼此或环境互动,使用规则来最小化由干扰引起的冲突,或最大化群体的生存总收入。为了探索这些问题,我们设计了一组执行类似觅食任务的机器人。我们选择觅食的动机与生物灵感有关,主要来自蚁群。
信天翁无人机:动态翱翔
信天翁利用动态翱翔飞过数千英里的开阔海洋。该项目旨在利用动态翱翔来克服小型无人机(uav)的续航限制。先前的研究确定了开环控制律,但为了在真实飞机上有效使用,需要一个闭环控制律。我们打算使用智能控制来识别这样一个闭环控制律,使用强化学习。这个项目的第二个方面是技能转移。最初,出于明显的安全和成本原因,控制器培训将使用模拟来完成。然后,学习到的控制定律将用于真正的滑翔机。
飞群:集体运动
本研究的主要目标是开发一套用于自主飞行机器人的集体极简运动算法。一组物理机器人已经被设计和建造,并被用来演示如何在三维空间中仅使用简单的规则就能实现群集和寻的。机器人使用氦气球(飞艇),因此推进、通信和定位系统的有效载荷有限。这种灵感来自于群居昆虫,它们只利用局部感知和交流,并不直接与所有群体成员交流。
胡须机器人:触觉传感器
2005年,我们与谢菲尔德大学的适应性行为研究小组开始了一个合作项目。这项研究由EPSRC资助,被称为Whiskerbot,研究了一种仿生人工胡须系统,可以提供一种新型的机器人触觉传感器,能够辨别纹理和物体识别。该项目包括在一个移动机器人上安装一系列主动控制的人工胡须,该机器人将输入大鼠大脑中感觉通路的生物精确计算模型。
会堂图/类别
大厅05
以前的
...麻省理工学院
E1:布里斯托机器人实验室
慕尼黑工业大学
下一个
以前的
下一个