- 提供配置文件
- 的Hatsopolous米icrofluidslaboratory (HML)在机械工程系内创建,作为研究活动的中心,其重点是了解微结构流体动力学和新兴的微流体学。HML包括一个6300平方英尺的开放式实验室,容纳了7名在职教师和3名退休教师,以及超过45名学生和博士后研究人员。以下概述了实验室教员的主要研究领域:
- 复杂流动的光学成像
- 复杂流体的流变学和动力学
- 薄膜动力学
- 流稳定性
- 流结构的相互作用
- 微流控装置中的流动和“片上实验室”的应用
- 生物流体力学和生物流变学
- 毛细管现象与接触线动力学
产品组合
RoboSnail
-
-
RoboSnail
- 蜗牛似乎是一种不起眼的生物,但事实证明,用一只脚在黏液上行走是一件相当了不起的事。
研究人员首次开发了一种机器人蜗牛,可以做到这一点。麻省理工学院的Anette Hosoi教授和她的团队,包括研究生Brian Chan,开发了机器人蜗牛I和II,它们可以像蜗牛一样移动。这种由电池供电的装置比一般的蜗牛要大,与软体动物并不完全相似,但它们通过蜗牛在黏液中爬行的两种运动模式。该团队在最新一期的《流体物理学》上发表了他们的研究结果。看到视频...
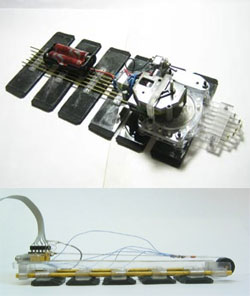
RoboClam -智能主播
- 第一个以蛏子为灵感的挖洞机器人是RoboClam。这个机器人模仿蛏子的外壳运动学,可以比真正的蛤蜊更大或更小,并且可以在海洋沉积物中进行便携测试。我们正在使用RoboClam1测量环境参数(如基材类型和钻洞深度)与性能参数(如钻洞速度和能耗)之间的关系。这些测试将为我们提供所需的参数理解,以形成利用蛏子挖掘机制的设备的设计规则。RoboClam测试还将使我们深入了解在动物对基质变形过程中起作用的主要本构机制,这将有助于建模机器人/基质的相互作用。看到视频...
-
-
-
-






