- 提供配置文件
- KOVAN研究实验室创建是为了研究智能系统合成从自然启发启发来自广博领域 从社会昆虫到生物神经系统进化自主代理器(包括机器人)优先选作我们研究中的主要测试台
产品组合
项目
-
边界所有权项目
-
- 在这个项目中,我们有三个目标:(1) 调查确定边界所有权的重要机制使用并解释项目(1)调查结果以开发计算模型估计图像边缘边界所有权使用开发计算模型解决重要视觉问题证明使用边界所有权有助于获取可靠完整视觉信息
-

开发人形机器人项目层次概念
-
- 在此项目中,我们将研究(认知化)开发并嵌入人形机器人如何从经验中获取层次概念表示法面向此目标,通过超越当前文献,我们将使用语言、外观和承载对象并调查这三个模式如何影响层次结构的形成拟用的方法和机制将在简明假设中展示,即人形机器人iCub与人交互执行清晰定义的任务
-

群集
-
- 这个项目的主要科学目标是调查机器人群动态可如何和扩展外部控制由两种移动机器人组成多数简单多数,另一组少数复杂实机实验辅助系统实验,用物理实战模拟模型进行实验,这些模型也将开发
-
嵌入式Linux
-
- 开发KOBOT成像子系统并准备随着项目进度扩展
-
测量机器人项目
-
- 项目设计机器人由远程代理通过蓝牙连接控制持有PDA者可移动stylus控制机器人将有能力horonomic运动, 并模拟路径 spylus画屏幕
-
三维彩色图像构建
-
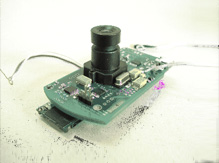
- Kurt3D机器人使用激光扫描仪获取扫描范围点的远程信息因扫描射线获取距离信息,只能计算扫描射线方向上点数的距离激光扫描器不提供这些点的任何颜色信息从Kurt3D机器人两色摄像头中获取这些点的颜色信息,如果点为摄像头视图之一
-
空间评估
-
- 蚂蚁如何评估有限感知闭合空间的大小和完整性,以及它们的方法如何应用到移动机器人上?
机器人
-
iCub
-
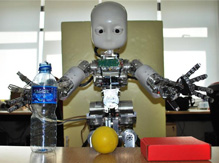
- iCub是一个人形机器人,我们收到它是因为成功从机器人Cub项目获取人形机器人平台,排名第6位31项建议项目将与欧盟RSSI项目并协同Tom Ziemke和ErhanOztop实施
iCub想研究概念开发 通过环境交互通信
-

Kurt3D
-
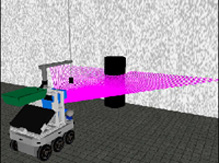
- Kurt3D自动移动机器人配有可靠精确3D激光扫描器,实现环境数字化高质量几何三维地图语义信息自机器人探索后自动生成
Kovan实验室有一台Kurt3D机器人用于我们的认知机器人项目
-

高博
-
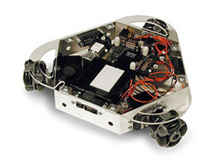
- 可控摇篮机器人:KOBOT
KOBOT由KOVAN研究实验室设计用于群机器人研究特征性能
- 非对称机体圆形直径120毫米高70毫米
- 300重标准机器人配置
- 差分引导系统使用2台高质量低功率
- 8红外传感器
HMC6352数字指南针模块
- 4小时自主使用Li聚用电池
- PXA255处理全向查看系统图像处理器
- EEE802.15.4/Zigbee兼容XBEEOEMRF模块远程编程能力
- 3光LED机和机上铃声显示机器人内部状态
-

开佩拉市
-
- kepera是一个微型移动机器人,功能类似于大型机器人用于研究教育kepera原设计为洛桑EPFL瑞士优先研究程序的研究教学工具允许真实世界测试模拟轨迹规划算法、避免阻塞法、预处理感官信息法和行为处理假设法等
kepera拥有高效机上应用库, 控制机器人、监控实验和下载新软件多扩展模块使其适应范围广的实验
-

海密松
-
- Hemisson对教师或业余爱好者来说是一个不错的工具,由瑞士公司K-Team创建,Hemisson是一个小型移动机器人
除其他外,它伴有二电机(依存双轮驱动)、一大批传感器(包括八光传感器)和电视遥控器有三个预安装程序(避免障碍、跟踪和跳线)和2小时自主性
编程改变行为, 固件也可以修改
Kovan实验室有五架Heison机器人用于Swarm-Robotics工作
-

LEGO思想风暴
-
- LEGO MINDISTORMS机器人发明系统由可编程式砖块组成(HitachiH8/3292微处理器)并命名RCX和许多其他传统LEGO建构部件命名TECHNICS
RCX有三个输入端口、三个输出端口和红外传输机/接收器可连接输入传感器,使RCX知道外部正在发生的事情有多种传感器LEGO提供,但只有两种类型随同RIS打包如果要使用,则必须单独购买其余部分。带包的传感器有2波段传感器和光传感器3输出可连接电机,以便机器人移动















