Videos
Loading the player ...
- Offer Profile
- V-REP is the Swiss army knife among robot simulators: you won't find a simulator with more functions, features, or more elaborate APIs.
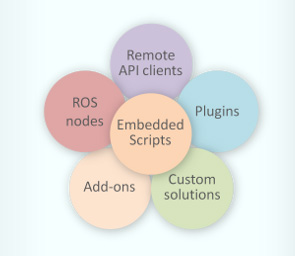
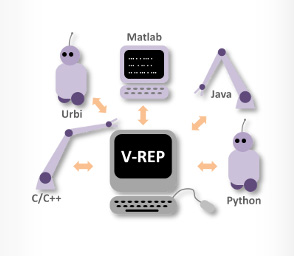
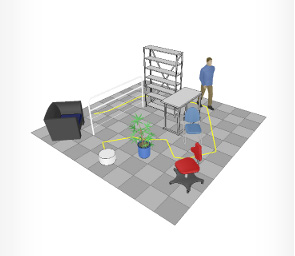
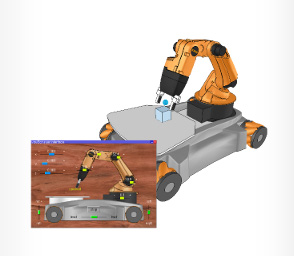
The robot simulator V-REP, with integrated development environment, is based on a distributed control architecture: each object/model can be individually controlled via an embedded script, a plugin, a ROS node, a remote API client, or a custom solution. This makes V-REP very versatile and ideal for multi-robot applications. Controllers can be written in C/C++, Python, Java, Lua, Matlab or Urbi.
V-REP is used for fast algorithm development, factory automation simulations, fast prototyping and verification, robotics related education, remote monitoring, safety double-checking, etc.
Product Portfolio
Project V-REP

V-REP Features
-
-
6编程方法
-
- Simulator and simulations are fully customizable, with 6 programming approaches that are mutually compatible and that can even work hand-in-hand.
-
Powerfull APIs, 6 Languages
-
-
- Regular API: 400 functions (C/C++ & Lua)
- 远程API: 100功能(C/C++, Python, Java, Matlab & Urbi).
- ROS interface: 100 services, 30 publisher types, & 25 subscriber types.
-
Remote API
-
- 100 embeddable V-REP functions: control a simulation or the simulator itself remotely (e.g. from a real robot or another PC). Easy to use, fast, supports sync. or async. operation, is optimized for heavy data transfer and minimizes comm. lag
-
Dynamics/Physics
-
- 2 physics engines (Bullet and ODE) for fast and customizable dynamics calculations, to simulate real-world physics and object interactions (collision response, grasping, etc.)
-

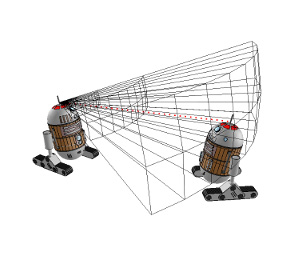
Inverse/Forward Kinematics
-
- Inverse/forward kinematics calculations for any type of mechanism (branched, closed, redundant, containing nested loops, etc.). An embeddable version of the IK/FK algorithms is available (i.e. can run on your robot).
-

Dynamic Particles
-
- V-REP supports customizable particles that can be used to simulate air or water jets, jet engines, propellers, etc.
-

Collision Detection
-
- Fast interference checking between any meshes or collection of meshes, with optional collision contour calculation
-
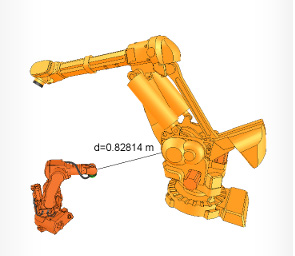
Minimum Distance Calculation
-
- Fast and exact minimum distance calculation between any meshes (convex, concave, open, closed) or collection of meshes
-

Cutting Simulation
-
- Simulation of surface cutting operations using various customizable cutting tool shapes
-
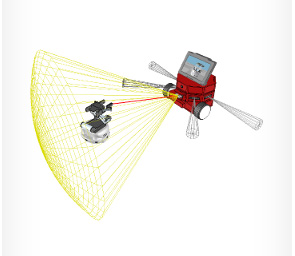
接近传感器仿真
-
- Powerful, realistic and exact proximity sensor simulation: performs an exact minimum distance calculation within a customizable detection volume. Much more continuous operation than with discrete ray sensors
-
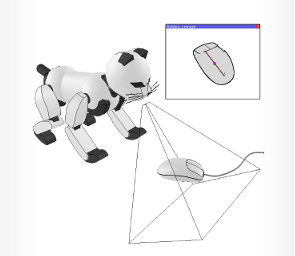
Vision Sensor Simulation
-
- Simulation of vision sensors with many built-in image processing filters, fully customizable and extendable (e.g. via plugin)
-
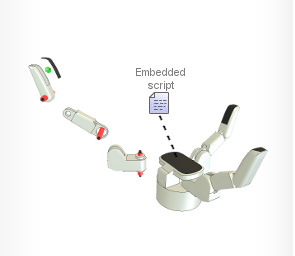
Building Block Concept
-
- Anything - from sensors or actuators, to whole robotic systems - can be built within V-REP by combining basic objects and linking various functionality via embedded scripts. Every scene object can have its own embedded script!
-
Path Planning
-
- Holonomic path planning in 2-6 dimensions, and non holonomic path planning for car-like vehicles. Custom path planning algorithms are also supported
-
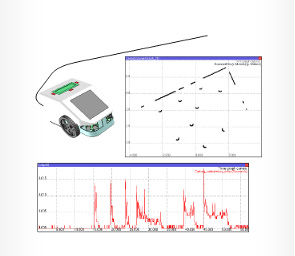
Data Recording and Visualization
-
- A large variety of recordable data streams (including user-defined) can display time-graphs, or can be combined with each other to form x/y-graphs, or 3D curves
-
Custom User Interfaces
-
- Unlimited number of fully customizable user interface elements, with integrated edit mode. Custom Windows-style dialogs are of course also supported through plugins
-

Integrated Edit Modes
-
- Next to the regular scene edition/composition, special edit modes are also supported, including mesh edit modes (including a semi-automatic primitive shape extraction method) or the path/trajectory edit mode
-
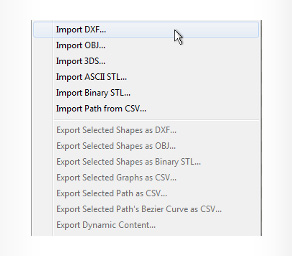
Easy Data Import/Export
-
- Following file formats are supported (also when called through the API): URDF, COLLADA, DXF, 3DS, OBJ, STL (ASCII & binary)
-

Powerfull Motion Library
-
- The Reflexxes Motion Library type IV is fully supported and provides instantaneous trajectory generation capabilities for motion control systems.
-
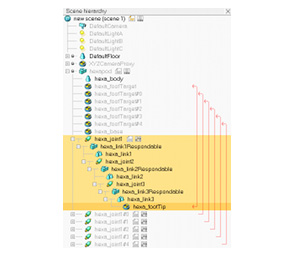
Full-Featured Scene Hierarchy
-
- The scene composition is intuitively visualized in a scene hierarchy view, indicating object names, types, associated control scripts, loop closures, selection and visibility states, warnings, etc.
-

反对venient Model Browser
-
- The integrated model browser supports drag-and-drop operations (also during simulation!) for convenient scene composition. The available model library, updated at each release, can be easily extended by the user
-

Full Interaction
-
- Full interaction also during simulations: models, together with their associated behavior (i.e. scripts) can be shifted, rotated, copy/pasted, scaled, erased, etc. without having to adjust any code
-

Free Educational License
-
- Educational entities (hobbyists, students, teachers, professors, schools and Universities) can use V-REP PRO EDU for free. The source code of all elements is available. Refer to the licensing page for details
-

Free Player Version
-
- A free V-REP player version is available, and allows running and interacting with V-REP simulations
-
更多的功能
-
- e.g. multilevel undo/redo, movie recorder, simulation of wireless communications, simulation of paint or welding seams, static and dynamic textures, exhaustive documentation, etc.




























