


你最喜欢的抓手刚好点保留形式因子并改进内部构件结果强手E提高有效载荷并改进保修
握手协作机器人
插件+游戏易程序
高精度广划
精密汇编任务理想
工业应用和恶劣环境搭建

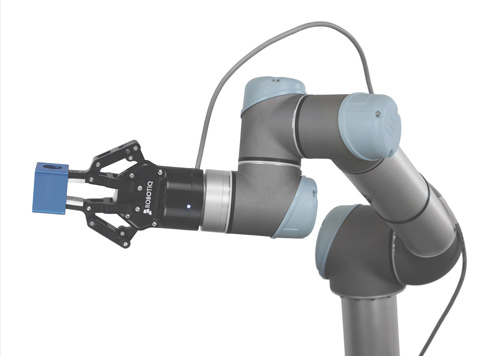
2F-85和2F-140适配Grippers使用机器人完成全行应用并快速生产-不需要机器人技术高弹性可靠机器人细胞关键
搭建协作机器人
简单程序
适应产业需求

你最喜欢的抓手刚好点保留形式因子并改进内部构件结果强手E提高有效载荷并改进保修
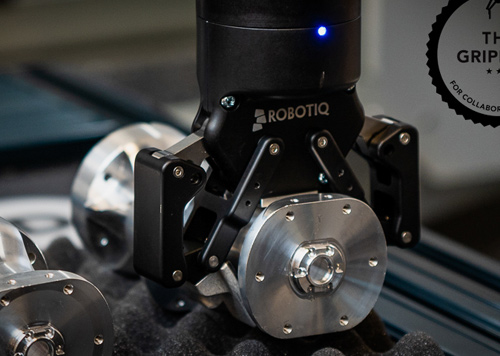
hand-E高精度和50毫米并行中风令它精密汇编任务完美化,而密封设计则保证最难制造条件的可靠性-包括CNC机械化hand-E设计坚持ISO/TS15066标准最佳做法,并有最大强度、圆边缘、自锁功能和其他特征,使其成为协作机器人的抓取器
搭建协作机器人
易程序化
设计工业需求

机器人Wrist相机设计用通用机器人执行工业应用教新部件并快速检测特征以确保可重复采样


变换生产过程 通过自动化 最高级力敏化应用市场程序复杂机器人分分钟移动-不需要机器人技术结果是强软机器人电池


3FingerGripper最佳选择取出形状中的任何对象
3F适配Gripper对高级制造和机器人研究最理想适应对象形状固抓, 这样你就可以专注于任务而非抓取


robtiqVacumGrippers可处理各种应用并最理想地取出由各种材料制成的不均匀甚至工作件,如纸板、玻璃、板金属(dry)和塑料由于可定制括号和独特的空节点,robtiqVacumGrippers向制造商提供对Gripper完全控制,以确保它完全适合应用
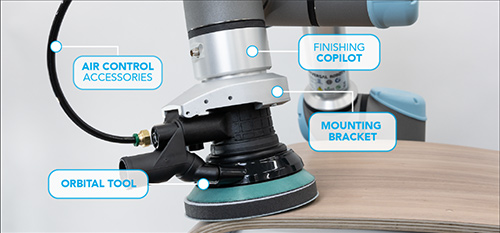

芯片飞走!机器人iq使用最佳现成组件为CNC机托管应用提供优化工具箱
电子学习程序
广泛的电子学习程序包括:

自动整理任务简单化,将Hand-E强抓IP67评分归结为Copiling强软件工具确保机器人以恒定速度和强力操作全方位完成


机器人Pickit
更好并发
与我们民主化自动化核心值一致的Bin Picking包为定位、采摘、处理和安放平面和圆柱部件定出一条清晰路径并不只是大产品组合问题 也是广博知识问题
试用binPicking和Robotiq触摸它