- 提供配置文件
- 动态机器人实验室成员探索、设计并搭建机器人系统快速移动并易处理撞击和动能传输例子包括行人机和运算机器人机、精密任务控制电动器,如拆弹机、下层和上层极电假肢机件、用于军用或辅助残疾人运动exskelet其中许多任务对传统机器人来说困难或不可能,因为硬件基本受限,如运动惯性限值和托盘限值机体系统动态是机器人行为不可分割的方面, 可以是限值或资产因此,我们的方法整合硬件动态设计与主动软件控制器设计新手设计机制加补充软件控制器可产生像人类那样灵活易懂的机器人
产品组合
动态机器人实验室
- 动态机器人实验室成员探索、设计并搭建机器人系统快速移动并易处理撞击和动能传输例子包括行人机和运算机器人机、精密任务控制电动器,如拆弹机、下层和上层极电假肢机件、用于军用或辅助残疾人运动exskelet其中许多任务对传统机器人来说困难或不可能,因为硬件基本受限,如运动惯性限值和托盘限值机体系统动态是机器人行为不可分割的方面, 可以是限值或资产因此,我们的方法整合硬件动态设计与主动软件控制器设计新手设计机制加补充软件控制器可产生像人类那样灵活易懂的机器人
研究
-
机器人行尸游荡
- 与Dr.密歇根大学Jessy Griwle卡内基梅隆大学的Hartmut Geyere, 我们的目标是构建并控制机器人 能够强健高效行走 并运行自然不均匀地形方法从生物启发动态模型开始, 从中我们创建理论控制策略 证明产生期望稳定高效运行数组使用这些模型然后设计机器人尽可能近距离匹配这些简单动态模型最后,我们创建控制框架映射理想模型对机器人行为的控制,因为机器人将不完全表示我们的模型。从理论模型到机器人实现路径循环路径,因为我们学习工程限制和新控制思想并相应修改机制控制器
-

优化启发控制
- 优化启发控制法是发现动态系统简单原则最优控制策略的方法仿生物启发方法, 使用优化解决方案作为启发源而非生物少数计算轨迹完全解决小段任务, 模式浮出水面是开发通用最优控制器的线索 解决大问题我们相信这些简单控制器结构 产生隐藏洞察系统
-
动物圈
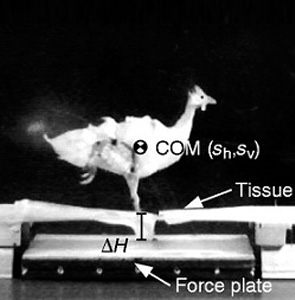
- 与Dr.Monica Daley比较神经机理团队 皇家兽医学院结构与运动实验室 我们正在调查控制方法科学工作由人类前沿科学方案资助将设计实验 确定地鸟,如小鸟和小鸟 如何冲过扰动,如地高变换或僵硬数据开发策略假设 鸟商谈多地形 并编译这些假设数学模型生成模型将用作ATRIAS控制目标希望这将使ATRIAS和地鸟在同一地形条件下实现相似电机行为通过这项工作,我们将发现动物如何谈判粗地形,我们将学习如何实施能匹配性能的机器人系统这项工作直接应用到新的电假腿、Exskeletons和机器人上人环境导航
ATRIAS2.0MONOOD
- ATRIAS2.0第二物理实现ATRIAS概念原创ARIPAS1.0单片版工程设计修改重大改变包括合并调音驱动器而不是电缆驱动器、电子机内大托盘、电池机内电机和波流电机(这些电机联动或拆动脚趾头)。原型导出多维双片版供俄勒冈州立大学、密歇根州立大学和卡内基梅隆大学研究使用
-
-
-
-
ATRIAS1.0MONOPOD
- ATRIAS设计为敏捷、强健经济行进和横跨不均匀地形,并使用其他高度动态动作,如跳跃、跳跃和跳跃被动动态或系统机械组件行为是专为匹配简单生物启发数学模型而设计简单动态模型实现后可实现理论控制并清晰理解和分析动态行为高层次目标与W奖一致 以前所未有的速度高效度
ATRIAS是两个协作研究项目的一部分:一个侧重于理解地游鸟策略的科学目标,另一个侧重于敏捷高效机器人动作这些项目互为补充,因为对动物运动的清晰理解将引出对机器人运动有用的洞察力和思想
-
-
-
-
MaBEL系统
- MABEL基于ECD设计赫斯特协同Dr.griwle,maBEL设计运行,行走,跳跃,跳跃,并通常行为高度动态大型玻璃弹簧用于存储运行轨迹的能量,类似于springs插头或kangaoo
ECDleg取自激活法和电源传输法电机比充气或液压电动器简单精确计算机控件电机用钢电缆环绕铝滑轮连接到腿关节,并有若干机械差分实现电机、玻璃纤维泉与腿关节之间期望关系
-
-
-
-
缩略图
- 缩图单片基于ECD设计赫斯特运行,行走,跳跃,购物 并通常行为高度动态大型玻璃弹簧用于存储运行轨迹的能量,类似于springs插头或kangaoo
ECDleg取自激活法和电源传输法电机比充气或液压电动器简单精确计算机控件电机用钢电缆环绕铝滑轮连接到腿关节,并有若干机械差分实现电机、玻璃纤维泉与腿关节之间期望关系
-
-
-
BIMAC
- BIMACC机能可调整序列达标)首次实现ECD设计赫斯特运行,行走,跳跃,购物 并通常行为高度动态大型玻璃弹簧用于存储运行轨迹的能量,类似于springs插头或kangaoo
ECDleg取自激活法和电源传输法电机比充气或液压电动器简单精确计算机控件电机用钢电缆环绕铝滑轮连接到腿关节,并有若干机械差分实现电机、玻璃纤维泉与腿关节之间期望关系
-
-
-
-
AMAC
- 可调整数组操作程序设计BiMASC使用,BiMASC高动态链式机器人光玻璃泉大容量存储机制有二电机,一动膝位,二控制膝部僵硬感知与句柄角并用这两个参数控制运行轨迹
-
-
-
-
其它项目
-

火星漫游机器人机制2011
- 描述 :这个项目扩展俄勒冈州立大学路由俱乐部供路由大学挑战使用过去四年来,火星学会在犹他州南部火星沙漠研究站托管URC比赛的前提是挑战大专队 设计并搭建下一代火星漫游
年份 :2011年
-

SWAT飞行器机器人臂
- 描述:手臂的目的是增加SWAT侦察车操作区,使其能够打开家门和柜子手设计能用L形柄或knobs打开典型家门
资金来源:塞勒姆警察局
年份 :2010年
-

火星漫游机器人2010
- 描述 :这个项目扩展俄勒冈州立大学路由俱乐部供路由大学挑战使用过去四年来,火星学会在犹他州南部火星沙漠研究站托管URC比赛的前提是挑战大专队 设计并搭建下一代火星漫游
年份 :2010年
-

SWAT队车
- 描述 :车辆的目的是远程进入潜在危险和敌对环境并有能力向SWAT团队成员传递任务关键信息
资金来源:塞勒姆警察局
年份 :2009年
设施
- 实验室大楼
动态机器人实验室设备齐全,设计、构建和故障排除机器人系统有两个主机房大一室机器人循环运行 邻接室机器人制造和台式实验机房内装有10米工作台空间、配有电源、计算机的钢板和原型激活系统安装点、存储式电子连接器和紧固硬件和五台计算机专用机械设计和电路设计现有硬件和软件基础设施建设控制机器人,并有设计与搭建功能机的经验
-
-
-
-





























