- 提供配置文件
- 机器人实验室成员是欧洲联盟机器人领域研发项目先驱
90年代前数个欧盟项目开发:Esprit二项目PANORAMA移动应用导航系统和Eureka项目SAMCA(软鞋厂)、AMR(高级移动机器人公共安全)和GEO(大型机器人化系统)。1992年启动Esprit三项目ROCCO计算机集成系统
产品组合
机器人
-

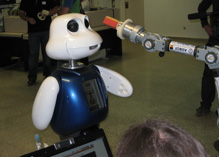
玛姬
- Maggie个人社交机器人由机器人实验室建立研究平台研究机器人交互作用 机器人智能自主
-

阿西博特
- ASIBOT为老年人和病人提供便携式辅助机器人,为日常任务带来更多自由,如进食、饮酒、剃须、补牙、刷牙等机器人正在托莱多国家百科医院实验
-

UC3M人形
- 完全21DOF人形机器人马德里大学Carlos III是一个自主机器人,能够在室内室外区域用不同式音轨行走,并真正协同工作环境与人和其他机器人合作
-

曼弗雷德
- Manfred(MANFriEnDly移动操纵器)是一个自主移动操纵器,设计目的是在需要人操作能力的环境中高效操作
当前研究题目
-
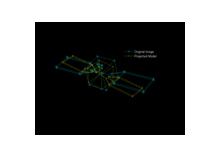
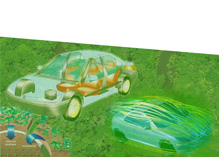
3D建模
- 建基于传感器系统三维信息学模型有两个目标:建跨区域模型以在复杂室内或室外环境导航并建三维模型操作
-

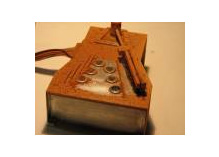
人工肌肉
- 研究领域的主要目标是开发基于生物智能材料和机制
-

辅助便携式机器人设计
- 研究领域的主要目标是设计开发真正可移植辅助机器人设备,用户在日常往返办公时可方便运输,为两种环境提供帮助。
-

自动3D大楼设计
- 研究领域的主要目标是开发系统实现建设过程自动化系统无缝整合建筑设计、规划模拟工具
-

自动模块化大楼汇编
- 研究领域的主要目标是在建设部门引入新的自动化和机器人流程目的不单提高生产率,还改善工作安全和卫生条件
-
生物医学工程
- 生物医学和机器人自然会发现常见点并产生混合学科,在医学、分子生物学和机器人本身产生广泛效果
-

计算机辅助机电设计
- 研究领域的主要目标是开发系统实现服务机器人设计过程自动化(市场无法提供)。设计将取不同观点:电机学、控件和结构
-

辅助机器人控制
- 帮助残疾人、老年人和有特殊需求者成为机器人系统近期最重要的服务应用之一
-

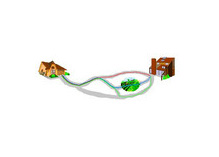
控制移动操纵器
- 强控移动操纵者并协调控制移动基地和操纵者许可,以通过识别意图实现主动人动操纵者合作
-

终端用户社会机器人编程
- 社会机器人面临的一个主要挑战是如何为终端用户提供直觉、自然和可享受使用性人正常环境社会机器人可成为教育娱乐工具
-
人形名词
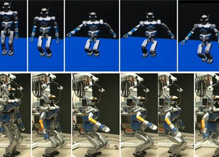
- 人形机器人稳定行走研究 一般问题非解决我们的研究处理稳定步态实施12DFRH0和RH-1双跃移动系统
-

硬件结构人形
- 人形机器人系统复杂,必须仔细设计开发硬件架构是人形机器人综合控制系统的第一步
-

人形头设计
- 本研究领域处理机器人Rh-1开发机器人头头部将安装各种传感器,如摄像头、麦克风等
-

人形运动规划
- 人形机器人双向运动需要计算先进高效算法解决全局导航避免阻塞问题和局部机械运动问题
-

人形工程和动态设计
- 本研究领域处理人形机器人Rh-0和RH-1运动动态设计开发
-

运动感知控制
- 项目的主要目标是设计决策系统,以情感为基础并使用不受监督学习方法,供自主社会机器人使用
-

多模式人机器人交互
- 开发自主个人机器人 Maggie 会以Peer对Peer方式与用户交互即多式性、个性、适配性、自主性、学习能力、合作性、回弹性和主动性
-

远程人机器人交互
- 远程交互作用是一种特殊型人机器人交互作用,人和机器人通过物理屏障分离,但通过远程技术连接
-

机器人手
- 设计、开发控制机器人手特征
机器人研究中最强烈的雄心之一是模仿人手,因为人手有几种可能的用法并有能力与环境交互
-

软件结构人
- 设计开发软件控制人形机器人从友好易用HMI到嵌入式组件命令所有关节运动
-

软件架构
- 人与机器人交互作用中 需要机制指定机器人任务AD架构开发于机器人实验室,它是一个框架 建模一套技能描述机器人性能
-
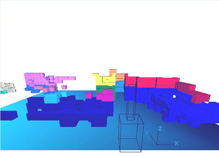
地形导航
- 今日地形导航被视为比较自然的导航方式地形导航使用环境的地形表示法,通常用图解表示法完全地貌导航系统AURON基础
-
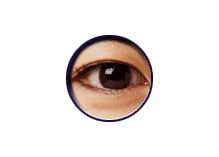
可视人机器人交互
- 机器人需要开发人际通信技巧 以便允许它与他们交互人类技能之一是人视系统, 我们在这里展示我们的系统 叫做认知感视觉系统
-
可视跟踪转发
- 重心是开发算法和技术 允许视觉系统自动适应变化环境
机器人类型应用
-

航空航天局
- 机器人实验室与航空航天有关的活动集中于两个完全不同领域:自主卫星视觉导航和欧洲战斗机某些通用系统模拟
-

辅助机器人
- 辅助机器人近期内最有前途机器人应用自2000年以来,机器人实验室开发机器人帮助残老助手(MATS)、普通交互智能助手(PRA)和普通人形助手
-
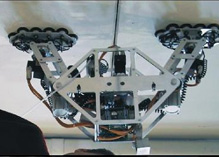
爬山机器人
- 爬山机器人领域研究始于1995年自此日期以来开发出数个机器人:罗马一号检验钢基结构,罗马二号沿水泥木等旅行,Mats机器人允许在国内环境移动
-

人形学
- 人形机器人程序机器人Lab于2001年启动,开发7DOF双机Leroy自2002年Rh-0项目后Rh-1目标开发21DOF全尺寸机器人
-
工业自动化
- 近几天来,在工业自动化领域建立了若干协作关系,作为建设流程自动化和自动化产业多项任务
-

移动操纵器
- 研究线的目标是开发先进移动操纵器,能够在人类环境中操作
-

移动机器人
- 移动机器人实验室研究最多领域之一团队工作聚焦控制架构、地形导航、多式交互作用和机器人情感
-

个人机器人
- 当前机器人主要分布工厂未来机器人也会进屋 做个人伴 娱乐和帮助我们的日常生活
-

机器人建设
- 机器人实验室在机器人和自动化建设领域研发活动开始于耳目90s数个工业项目和欧盟项目与预构件自动化有关,模块化建筑设计与搭建已经完成
项目
-

水手
- 混合神经素养设备功能补偿和修复电机故障
-

ARADIA
- 机器人认知助手
-
机器人City2030-II
- 服务机器人提高城市生活标准
-

TechnoFusión
- 马德里区域国家融合技术中心被视为开发未来商业聚变反应堆所需技术所需的基础设施
-

汉卓
- 开发路径实现自主和智能机器人手控
-

算法Cth
-

AROS系统
- 社会机器人新方法
-
mTBM-指导
- 高级定距导航系统微闭锁无趣机
-

沉浸式
- 中心和公共基础设施爆炸物检测系统
-

PCAET
- 协同路径规划并进化适应移动操纵器任务
-

CARHU
- 人形机器人和人间协同工作环境主动合作
-

unconstruct
- 地下技术创新约束
-

机器人@CWE
- 高级机器人系统未来协同工作环境
-

罗波哥
- 自主合作机器人
-

rocity2030
- 服务机器人提高城市生活标准
-

I3CON
- 工业化综合智能构建
-

ASIBOT-HNPT
- 托莱多国家瘫痪医院辅助机器人
-
manuBuilde
- 开放楼制造
-
Geost-MC
- 多维城:智能调音
-

R2H
- 等同机器人-人交互
-

寄生虫
- Acoplamiento y Agarre中位数 RobótiosbasadoenVision
-
PSA卡得拉
- 剖面自动化
-

Rh-1
- 开发人形机器人与人合作任务
-
IPCIS系统
- 传感器综合高级移动操纵器中规划与交互控制
-

3Dman
- 三维对象使用视觉控制技术
-

EADS系统
- ECS、ETC和LFE系统模拟
-

EU-JP构造
- 欧洲联盟-日本研发建设财团
-
MARS-DW
- 火星擦尘器
-

IVLM
- 机电学国际虚拟实验室
-

侧面图
- 综合系统辅助机电设计面向计算机自动优化服务机器人结构
-

PRA
- 个人机器人助理
-

h-0
- 自主智能人形机器人应用
-
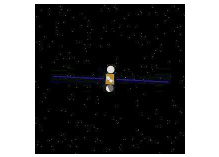
里沙纳
- 卫星识别通过相对自主导航检验
-
任务设置
- 自主移动操作程序运行困难环境
-

MATS系统
- 弹性机电辅助系统支持有特殊需求者所有生活工作环境
-

IECAT
- 自主远程操作系统创新教育概念
-

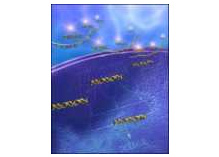
TOPO系统
- 运动机器人地形导航
-

GRC2
- 工厂自动化开发前GRC片段
-

未来之家
- 下一世纪欧洲住房:人人可负担得起的高质量住宅
-

ROMA2
- 多自主低成本机器人系统协调非常规任务应用
-

ManMove
- 移动操纵者Otlio开发
-

ROMA1
- 多功能自支持爬山机器人能够在复杂环境中旅行














































































