

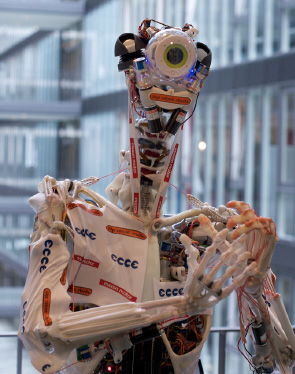


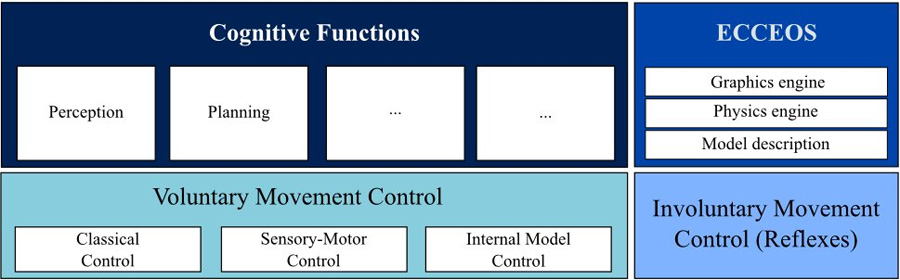
自愿运动控制单元
自主调度方面,开发三种不同的控制方法并整合成单混合架构,以便选择最合适的控制策略执行不同任务三大控制策略是:(1)经典控制,(2)感官运动器控制,(3)内部模型控制
非自愿运动控制单元
反射并非自发控制 反射是全局行为总体而言,反射需要多肌肉作用成形反射控制系统无法单动画级实现计划实现的一种反射法是后台反射法另一组反射对项目过程可能很重要的是反射可触发的反射,例如意外触摸时可触发反射
ECEOS
ECCEOS基于物理计算机模型机器人服务多重目的系统用作所有控制器的演示开发平台,并用作运动规划内部模型和执行时误差监控内部模型模拟器三大组件为:(1)物理图形模型描述,(2)物理引擎(碰撞检测模拟动画等)和(3)图形引擎(视觉反馈和模拟场景交互作用)。
认知函数单元
认知函数单元决定机器人行为由感知单元、规划单元、决策单元等组成






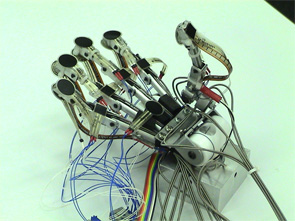
偏转驱动机器人手部分由弹性、弹性和变形材料组成举例说,斜点弹性化,指针变形化,指针间也有变形素15度自由由13servomots驱动,每根手指上安装弯曲传感器以测量位置,一组标准FSR压力传感器覆盖手(例如指针上、背上和掌上)。

动物形态多样性在水下世界特别令人印象深刻发现各种形态特征优化 以高效运动进化过程在此项目中,我们为水下机器人运动探索形态特性面向自适应水下运动项目调查像鱼游泳机器人使用运动控制 只有一个自由度, 机器人展示出奇多行为多样性 三维水下环境
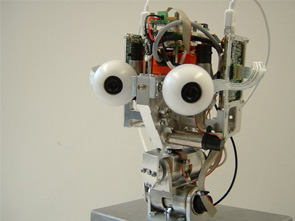
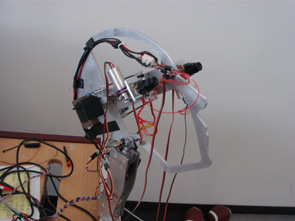
构建机器人的主要目的是研究构建一致性表示视觉、听觉、机能感知过程,并研究该表示方式如何用于描述/授权存在感目标是理解人和机器中的代表性我们准备在开发框架内实现这一点,例如通过从开发系统的角度研究问题在此框架内,我们将使用两种方法:一方面我们将调查大脑学习机制,通过学习和实验人类婴儿构建统一表示法另一端我们打算使用人工系统(例如机器人模型和表达感知-动作理论

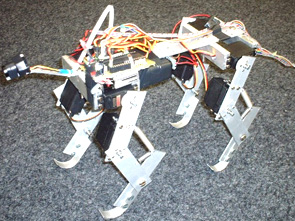
实现快速运动,开发形态特性至关紧要运行四重机器人MiniDog通过使用像spring式属性、权值分布和体积等内在体动使用机体动态技术 机器人控制极简单 而且行为多样性丰富
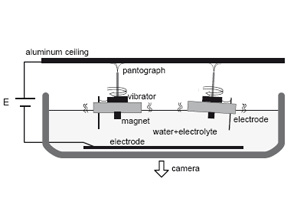
当我们观察细胞微世界时,我们看到大量分子并发并并发并管理高自主活动
并不存在中心控件, 但他们自组和-即你读出句子的方式(和原因)。
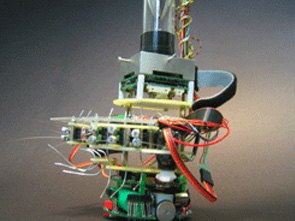
解决生命之谜(并创建维生机器人),我们开发了Tribolon研究板块-Tribolon(出自Triblogy)-世界唯一自推装配机器人
检查细节www.tribolon.com...................

臂机器人由高非线性人工肌肉驱动器组成详情请问开发商Raja Dravi
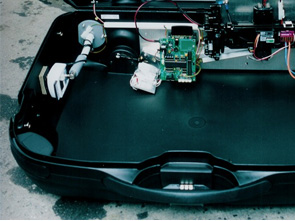
机器人启动远程控制车(RC-car)并有某种特殊体机体是一个硬壳手提箱 内装着略微缩装RC-C基础RC-C车安装方式使电机能为后轮提供电源,同时方向盘-servo连接前轮手提箱从微控制器控件转换为常用远程控件接收器嵌入手提箱内,可通过开关激活内建用于示范目的,在本任务中无益
我们开发出人工回声传感器自然老鼠胡须粘到电容器麦克风上,使变形螺旋移动麦克风膜可放大和数字化信号AMOUSE旨在搭建移动机器人,配有人工回文系统,作为基于神经生理实验和神经建模结果校验模型的平均值Amouse标准Khepera二类机器人配有两组人工插件阵列胡须由自然老鼠胡须组成 粘在电容器麦克风上搜搜机即单传感器whistkers可主动移动数据采集用笔记本电脑并发PCMCIA数据采集卡机器人全向摄像头允许实验触觉感知、多式问题和视觉导航

多实验游人形机器人发现 人类受多种限制游泳举个例子,当我们游泳时我们必须吸气 机器人不是这样人类系统的许多方面都暴露更多细节描述将很快到来
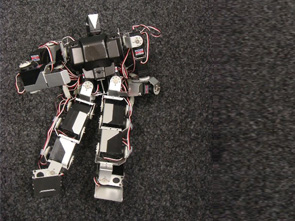
目前有3Kondo人从日本公司购买舞蹈家Pabro Ventura使用机器人 下次展览出人意料

四重旋转机(AI实验室,苏黎世大学,瑞士)机体动态可大大减少计算努力和代理控制器复杂性工作显示相位延迟四重代理为独有控制参数足以导航二维表层

人工智能实验室将使用Whring Arm实验工具研究昆虫视觉可视之为一种“昆虫眼模拟器 ” : 人工昆虫眼线(相机或特殊构造复合眼线)安装在Wirring Arm上,然后通过空间快速复杂运动,空间可(在某种程度上)模拟飞虫头所遇的实际状况研究目标之一是更好地了解昆虫眼睛的具体特征(例如传感器形态学)与动物飞行期间相遇视觉输入相关联,并了解这如何促进飞行控制昆虫像家飞快速导航 Whirling机制必须能产生快速响应并同时为快速加速提供足够的电流
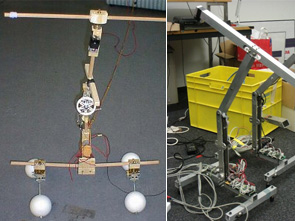
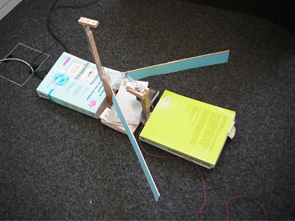
Stumpy项目探索运动基本设计原理然而,我们不单纯复制生物系统设计,而是努力提取基础原理项目中最基本挑战之一是如何通过解析形态学和生理设计简洁性增强机器人行为多样性基于此视角,在这个项目中,我们正在调查振荡基础激活、物属性和与环境交互之间的交互作用Stumpy使用假句动画诱导双脚购物口音机械结构由僵硬倒置T形状组成,四尺适配直立T结构由旋转接头连接横向波束右转二圈连接垂直波束使用二度自由机械结构 用简单动画轮廓机器人 能够执行多项不同行为控件

多型小树木由Fumiyai机器人大小对机器人整个动态有重大影响,但我们一直显示稳定性为形态学和机制与动态相关

机器人兔子建于同立体概念下通过双旋转质量跳转可向前移动并观察到强攻不同类型磨擦

Dumbo是一个杰出机器人 消除常识详情请访问实验室
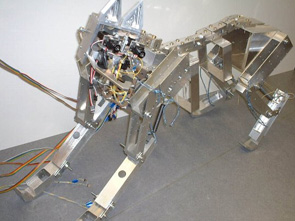
项目的主要目标是探索生物启发脚步运行机器人设计原理这一项目特别侧重于生物机理研究启发四重机器人快速移动最小模型因此,该项目的目标是实现技术快速脚动并加深对生物系统运动机制的了解
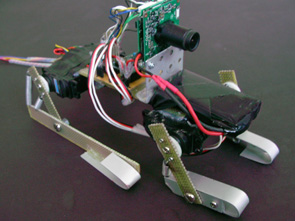
Schmaroo机器人可跳几公分机器人有摄像头和长腿生成垂直跳动名字取自开发者Schmitz+Kangaroo

咖啡开发调查人机器人交互机器人有两个启动程序,使机器人头部以多种方式移动通过实验机器人,我们学到 甚至简单点头运动 可分类为多类型
在这个项目中,我们正在开发机器人,它能跳动翼盘旋制造机器人,我们专注于小设计概念和形态计算概念,我们利用最近人工智能领域提议的“物质属性”。基于概念,我们设计机器人 拥有华府电机和曲柄机制击翼机器人双翼横向平面跳动, 由软材料制作,如聚氨酯、纸板和塑料增加空气流向下并测量机翼各种材料和大小的提升从结果中,我们得出结论 素材和机翼大小 应根据拍频度 机器人权重等仔细选择
与移动化有关的项目大都由Fumiyaida启动项目显示,拥有适当的形态使动态系统实现稳定运动并使用简单控制器(脑电图)。

这个项目旨在获取伪动态Walker设计方案,我们开发机器人从系统视角和控制视角建模二肢
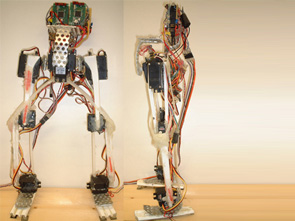
形态学和物质属性关系 双机值得攻击考虑到这两个方面相似性, 我们设计机器人叉腿机器人

猴子如何用这么重的身体跳树爬树在这个项目中,我们开发了猴子机器人来揭开猴子的秘密机制,特别通过调查人体固有的振荡

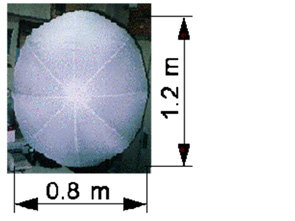
Melissa开发为飞机器人项目机器人平台,信息技术大学苏黎世机器人Melissa像飞机器人,由hium气球、Gondola电子机主机和离机主机组成气球长2.3m,提升容量约400g康多拉内部有3个电机旋转、高压和推力控制、四道无线电发报机、微型全景系统以及电池
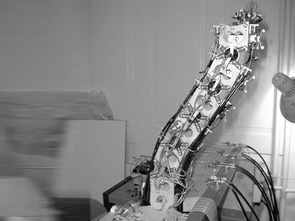
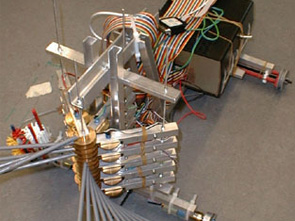
最复杂配置中,extrorator由七段组成,由七电机激活接收126传感器传感操作者必须执行的首要任务是穿管不触动墙壁,寻找通向空间特定点的方法,并最后游遍环境到某个点并同时执行屏障避阻
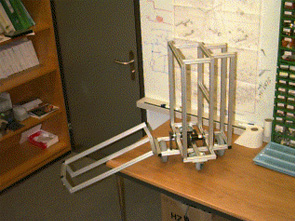
机器人使用电机自主定位传感器机器人的任务是使用运动准数估计临界距离至屏障实现这项任务的方法是通过演化算法修改复合眼的形态,同时使用固定神经网络控制机器人16长管中各装有光传感器,可检测角约2度内光线管可旋转公共垂直轴

机器人用软机器人搭建工具箱 快速搭建数组机器人人造演化系统进化模拟代理特别关注这些机器人形态作用,以适应特定环境后用这些模拟代理器(左侧)为蓝本构建实战机器人最后,机器人在现实世界环境测试以评价它们的适配性

实验搭建包括:(a) 工业机器人操纵器六度自由度(DOF);(b) 色立体主动视觉系统;(c) 安装在robot*fs抓取器上的触摸传感器集机器人曾用于开发机器人领域实验

Neronics公司制作
武士机器人由Hiroshi小林设计并正由Neuronics公司兴建新人工智能课程本科生使用它,但也用于研究目的Samurai配有:由12红外近距离传感器组成的数组,8Bumper传感器,全向色相机,配有2个15瓦特DC电机的不同方向图,摩托罗拉68336主处理器

Sahabot2由Dimitros Lambrinos和RalfMoller与RosysAG、Hiroshi小林和MarinusMaris合作建原创Sahabot专为沙漠蚂蚁导航行为的具体实验而建,1997年8月在撒哈拉沙漠图尼斯部分运行

Sahabot由Dimitros Lambrinos、Hiroshi小林和MarinusMaris搭建建立它是为了进行与沙漠蚁群导航行为有关的具体实验于1996年7月在撒哈拉沙漠图内斯部分运行,同一块地区由神学家收集实学数据
honey是一个飞自控机器人室内浮流由离机PC控制运动式多传感器包括摄像头和四螺旋桨运动控制主要由Hiroshi小林开发,Rene Schaad提供一些帮助蜂蜜主要用于导航实验和人机器人交互实验

Gloria改编DadebotDidabot系统通过提供改良电池寿命(目前可达1.5小时)、保护覆盖器、波感应器和实时时钟改善修改之所以有必要,是因为Gloria是Rufus的伙伴,Rufus长期在非修改办公环境操作

模拟机器人用纯模拟硬件执行视觉寻址硬件基础为Average地标向量模型描述见我们的论文“Landmark非抓图导航平均陆标向量模型”,可登陆Ralf Moeller主页获取
自主机器人MorphoI控制架构由Marinus Maris所建,基于神经变形设计基本而言,机器人控件完全感知机芯片处理所有感知器(23像素对视阵列)、边缘定位检测(均以位置编码取优)、决策性(注意偏差)和电机方向盘(为servo提供脉冲的峰值生成器)。任务从两条可能的线中取一所跟踪线由芯片外控 调整机器人注意力
sita由Marinus Maris搭建sita建建模型汽车库,装有1D摄像头(64像素)、16IR环境光传感器、回波器和语音生成器机器人的任务是按时运行事务语音生成器(希望很快增强语音理解可能性)将使机器人能与人语言交互
Marinus Maris用系统软件由Rene Schaad和Daniel Regenass搭建十架教育机器人,feifers类新AI特征:基于R/C车(Tyco Scorcher)快速差分4WD(6分中4分支持)、Intel 16位196KD微控制器(20MHz)、IR和环境光传感器C编程装配器
鲁弗斯Tfirefly由Rene Scha多功能扩展平台自主代理研究
Famez是一个快速机器人完全依赖一个传感器(超声波测距器)。三台由Marinus Maris建于实验室 建建模型汽车装箱顶速~10mph莫托罗拉MC68331和HC11微控制器
机器人由Rene Schaad搭建特征像汽车方向盘20Mhzintel196KD微控制器Sonar
Cyclope是在瑞士洛桑瑞士联邦理工学院微信息实验室开发的我们拥有一例评价特征包括:循环形状12.5cm直径5"、HC11微控制器、64元素线性CCD数组、波比器、调试板、IR遥控器、图形LCD等
赫佩拉是在瑞士洛桑瑞士联邦理工学院微信息学实验室设计AI实验室目前拥有15Kheperas特征包括:循环形状,5.5cm直径(2.2),小尺寸允许桌面实验,2DC电机用于差分方向转20分钟自主或逐线电源摩托罗拉MC68332微控制器