

HCR集团认为人居机器人提供证明基础,智能系统、自主机器人和人机器人接口最先进思想和设计可测试并投入运行换句话说,先导技术会在这里出现,后传到智能系统的许多应用领域和机器人,如娱乐、保健、体育、营救和服务等
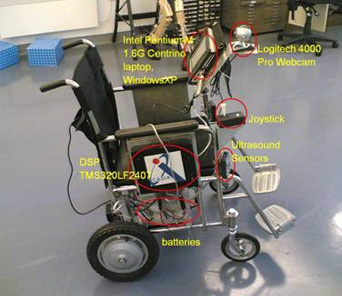
联合项目的主要目的是探索开发高性能低成本机器人教程所需的先进技术,使老年人和残疾人获得独立生活和提高社会生活质量的必要运动能力机器人主席应拥有方便用户人机接口并有能力避免碰撞并规划路径它将配有新视觉系统和非线性通信系统,以便其护理者或相对者在必要时能够监听和远程操作
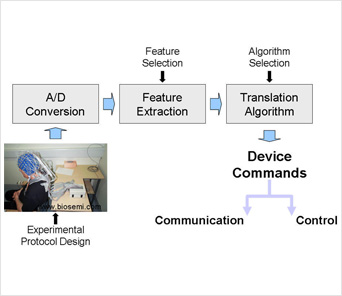
项目侧重于两个复杂工具:一是智能控制系统实现良好控制稳定性、快速图像处理能力和自主导航并使用手机3G远程监控和通信项目由皇家学会和中国科学院联合资助
这个项目由皇家学会17910英镑和中国科学院33330英镑联合资助,即“智能机器人教程:提高老年人和残疾人生活质量”,1/5/2004-30/4/2007

