- 提供配置文件
- 机器人实验室综合技术学院、学生和设施先进技术能力和研究知识与机器人系统领域
最近创建的Kahn医学机器人实验室研究与指令处理令人振奋的新医学机器人领域,该领域极有可能显著改善每年数以百万计的医疗程序并使之现代化
产品组合
项目
-

-
游泳微机器人
-
- 微机器人性能可用工作空间与自身大小之比评价如果任务包含机械交互作用,微机器人性能还包含有限容量的可能力力和工作空间标准通常自相矛盾,因此微机器人将评价以适应特定任务
微机器人拥有移动工作空间,如行走、游泳和飞行微机器人微机器人评价基础是有效输出电量与耗电量之比自主微机器人中,其他组件必须加以考虑组件作为电源(PS)和用于操作(AM)的其他启动程序
为了评价自主微型机器人 综合模型必须导出模型必须包括下列组件:
- 电源-模型中我们将定义给自动机机器人最优电源法
- Active-Am-Activity把提供电转换为所需任务
- 环境模型-机器人环境模型由机器人任务决定几何限制和理想工作空间由EM确定从机器人任务中,人们能够判定PS、AP和AM之间的最优分布,即自主微机器人设计面向任务
-

-
弹性针线引导控制
-
- 当前趋势 现代医学少入侵性 本地理疗现代临床实践最常用程序之一是插针导管切除切除术针插入式程序包括防疫、血液/氟化采样、区域麻醉、组织生物检验、导管插入、低温消解、电解脱火、近距离理疗、神经外科、深脑刺激、最小侵入性外科等
这些问题可以通过引进薄软针解决况且已知稀疏针对病人较少痛苦反之,柔性针深入组织内非常复杂系统非最小相位行为不直观控制弹性针插入路径规划 和避免人体组织内屏障 是一个挑战性问题 机械和机器人创建自动化系统可编程并执行薄软针插件将尽量减少错位、降低风险并减少患者痛苦
软针插入粘结组织由线性波束配制,虚拟泉水支持使用简化模型前向反运动学解析针头,为模拟和实时路径规划提供方法使用反运动学可计算针基轨迹
-
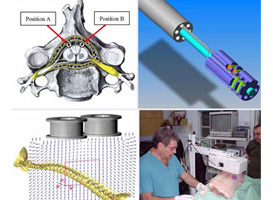
MINOSC-MicroNeuro脊柱镜像
-
- 内窥镜在病人身体内定位和导航通常以外科医生识别解剖标志为基础。然而,当使用长弹性内镜时,这一技术可能更加复杂化。拟调查系统提供图像稳定取向,使用软内镜端点微磁传感器外科对解剖特征的感知增强可精确定位内镜系统测试体外并提交实验结果
-

三维对象注册计算机综合外科
-
- 调查建议高效注册方法 机器人辅助外科当前注册技术往往需要安装人工标识或数字化设备,如光电或磁传感器或激光扫描仪,这使注册过程复杂化。
注册过程在此描述使用表面匹配技术,因此不要求安装标识三大思想简化注册过程第一,机器人本身被用作数字化器消除对额外定位器的需求第二,骨建模基础多分辨率技术自适应注册第三,开发算法确定最小采样点数和位置注册,从而松动操作内采样过程
拟方法应用到TotalKne Arthroplaty程序上,并特别注意使方法适应手头外科应用
-
RSPR3小型Parell机器人
-
- 由三大运动链组成 连接基站和移动平台每一链条都包含下链路旋转分叉到基站并自基站中心偏移下端链路的另一端,由球面连接连接推导器上端启动器通过回推联合连接移动平台转动接头轴构成移动平台平面的等边三角
设计过程包括奇特性架构分析产生机器人工作空间内最小数奇特性机器人特征之一是它能对垂直轴执行90度旋转并让线性驱动器与移动平台平面对齐而无并行奇性,移动平台在其中失去约束(分量不可控制自由度)。
-

虚构并发并行机器人
-
- 由三大平面激活链路组成并行机器人的九进制动态分析见本文件三平面电机协调连接三长链路产生输出链路六度自由运动极简单设计比常用并行机器人大得多,使高性能对简单性比机器人非常有吸引力实验模型验证大型工作量和高精度这一机器人的独特组合
-

弹性并行机器人
-
-

ROSI-ROBITIONE环境
-
- ROSIE是一个机器人模拟环境 面向学生软件的用意是向学生提供实践和理解不同机器人课程所学题目所需的工具
使用此软件,学生可编译并配置denavit-Hartenberg参数ROSIE允许用户为机器人插入逆数学方程并验证解决方案正确性ROSIE环境中包括机器人控制器,仿照工业机器人中发现的教程程序用户可操作机器人仿佛实战3D模型对每一联合使用的可能性使用户几乎可以使用任何机器人,而不需要大预算。
其它项目
-
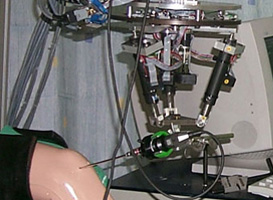
医学机器人剖腹术
-
- 研究的目的是通过向子宫引入小尺寸机器人,直径小于2毫米,改善胎儿治疗,以纠正或逆向先天胎儿异常效应诊断出严重综合症的胎儿外科手术提供替代堕胎、子宫内死亡或终身残疾的替代方法。受体数目统计低,而胎儿微机器人研究有高发病率证明有理,经证明通过干预产生优异结果,教育价值推广到其他程序第一次微机器人应用将处理先天分片性热量问题,隔膜肌肉穿孔,腹膜剖面压缩并因此防止肺适当发育微机器人将执行临时气管隔离,防止肺液反射,从而增加反脉冲压力,足以将腹部内容推回原位并允许继续脉冲生长外科医生通过无菌场外的摇杆完全控制机器人活动,由机上摄像头投射的实时图像和2D/3D超声波引导微机器人设计将浸入流子宫内环境,为新聚合启动器、独有机器人运动器和实时子宫内成像工作提供理想条件
-
EEG脑算界面调度
-
- 研究的目标是构建脑计算机界面,基础是记录脑电波图变化,即电容图信号,以便实现运动控制EEG使用表面电极记录信号会处理、映射并转换为运动命令运动命令将用作向控制单元输入信号,控制单元将移动计算机屏幕上对象或控制机器人臂
-
Endoscopy自动机机
-
- MiniCap是一个微型胶囊,它能自主移动滴水并传送图像到机体外的接收器小型Cup将包括微型视觉系统,它能向人体外接收者传递信息使用自主推送系统 在灌溉联合体内操作外部定位系统将实时跟踪小型Cup定位并投放3D机体模型系统尺寸定直径3毫米和长度10毫米MiniCap进化病人身体 通过同一个洞插入外科工具 从而进一步减少程序侵扰
-
机器人处理微系统平台调查
-
- 从微电子程序衍生出技术,使MEM系统基本组件像启动器、联合齿轮等能够制造但没有工具操作这些元素 特别是在开发阶段
原型微电机系统典型处理任务/操作,需要微系统执行这些任务/操作:非触摸检验、触动弹性测试、清洗、联结、胶合、机械测量、电子测量
测量 光学测量以上所列多项操作今天被视为问题技术任务
自此,MEMS典型维度范围从数十微米到几毫米不等,对高精度小维工具及微系统以操纵这些元素的强烈需求小型操作系统必须开发
经典机器人不精度操作这些组件, 并因驱动力下降速度快于扰动(如摩擦)摩擦力比惯性力大 系统不再有效










