类别
机器人
21日xx
大厅地图/类别
大厅21
以前的
...马德里卡洛斯三世大学
O2: ETF,贝尔格莱德大学
汉堡大学……
下一个
以前的
下一个
导航:
EXPO21XX
>
机器人21 xx
>
H21:人形和机器人研究
> ETF,贝尔格莱德大学
贝尔格莱德大学ETF
概述
业务概况
详细联系方式
网站
发送电子邮件
分享:
提供配置文件
电子工程学院机器人学科的研究方向一直是机器人动力学、设计、控制和应用。以下几项成果可以被视为机器人领域的先驱:
动态方程的计算机辅助生成——世界第一种基于拉格朗日方程的算法
世界上第一个机器人CAD系统,
限制机器人运动,
冗余机器人的分布式定位,
关节有弹性的机器人动力学,
介绍新的领域-机器人笔迹
产品组合
包括运动在内的复杂类人运动中的人/类人建模与仿真
所建立的数学模型可用于表示和求解任何运动任务中任何类人构型的动力学问题。日常活动、体育运动等中的特定运动是作为一般理论的特例来考虑和解决的。模型和软件已经检查了在干扰下的双足姿势稳定性,行走,跳跃,手球和篮球动作,足球,网球…这项工作是在项目人形机器人-理论和应用中完成的,由塞尔维亚科学和技术发展部支持。
手球动作
给出了一个手球动作的模拟结果:球员跳,接球,摆动手臂,最后扔球。
足球守门员
这是一个足球守门员。
完全拟人机器人的控制
最近的ETF (
电气工程学院
作为欧盟资助的FP7项目ECCEROBOT(符合性工程机器人的具身认知)的合作伙伴,以及ETF在提供工程控制方面的作用,引发了这种关注(拟人机器人)。控制问题的复杂性在于,我们考虑一个模仿人体上肢的多关节机器人,由具有顺应性的对抗“肌肉”驱动。这意味着关节是由一对“肌肉”驱动的,这对“肌肉”起着激动剂和拮抗剂的作用。事实上,每一块“肌肉”都是由一个直流电机缠绕着一根连接在“骨头”上的绳子而形成的肌腱。该肌腱包括弹性的消耗性元件。
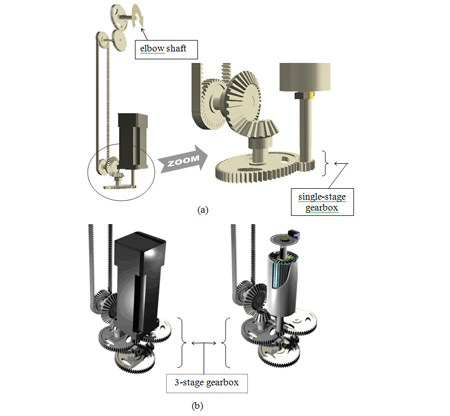
肘关节的结构
肩膀旋转的结构(和其他关节)
机器人与机电一体化远程学习虚拟实验室
这个想法是允许远程学习技术学科(如机器人)的需要限制了实验室练习的可能性。机器人与机电虚拟实验室从系统动力学的复杂数学模型开始,以确保虚拟系统将以与真实系统相同的方式运行。编程接口与实际系统使用的接口相同。用图表和高质量的动画展示了动态模型和仿真的结果。虚拟实验室不仅表现得像一个真实的系统,可以在工作中被观察到,而且提供了真实系统中不可能或不允许的选项(超载、更换电机、更改控制概念、移除机器人外壳以显示运动中的内部机构等)。
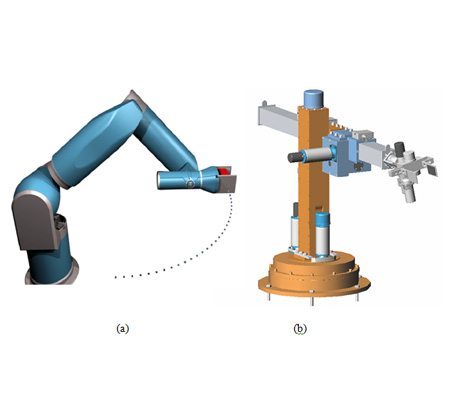
虚拟实验室中目前“存在”的两个机器人:
(一)连接配置
(b)圆柱配置。
移除机器人盖,露出驱动肘部的内部机构
机器人的笔迹
先前为机器人制定的分布式定位(DP)概念被用于解决手写的冗余问题。DP概念包括将原始的末端执行器运动分离为全局慢运动和局部快运动,并根据它们的动态能力将这些组件分配给机器人关节:慢组件用于大规模基本配置,快组件用于轻冗余。在书写中,发现了手指参与程度、易读性和字母倾斜度之间的关系,并证明了一个规定的易读性的最佳倾斜度的存在。笔迹随疲劳程度的加深而退化。机器人协助纠正书写障碍被视为最终目标。
五自由度写入机构的配置(结构)。
手指的协调运动产生两种翻译
手指介入(IKI)、书写倾向(α)和易读性(Le)之间的关系——最佳倾向导致手指介入最小
字迹随着疲劳的进展而退化
大厅地图/类别
大厅21
以前的
...马德里卡洛斯三世大学
O2: ETF,贝尔格莱德大学
汉堡大学……
下一个
以前的
下一个