Videos
Loading the player ...
- 提供个人资料
- Our mission is to understand the science, engineering and social role of robotics and embedded intelligence. Our multidisciplinary approach aims to create autonomous devices capable of working independently, with each other, or with us in our human society.
Launched in December 2005 the Bristol Robotics Laboratory is a collaborative research partnership funded by the University of Bristol, the University of the West of England and HEFCE. Under the direction of Professor Chris Melhuish the laboratory is an evolution of the Intelligent Autonomous Systems Laboratory (IAS)
产品介绍
Projects
-

能源自治:Ecobot
- 一个goal of our work is to build energetically autonomous robots. For this, the Microbial Fuel Cell (MFC) technology is employed to extract electrical energy from refined foods such as sugar and unrefined foods such as insects and fruit. This is achieved by extracting electrons from the microbial metabolic processes. To be truly autonomous, robots will be required to incorporate in their behavioural repertoire actions that involve searching, collecting and digesting food. The robot will be designed to remain inactive until sufficient energy has been generated to complete its next task. This may prove to be a paradigm shift in the way action selection mechanisms are designed.
项目代码名称:“ ecobot”。
到目前为止,已经开发了两个这样的机器人,即Ecobot -I和Ecobot -II,它们在某种程度上表现出这种行为。Ecobot-I于2002年开发,使用了大肠杆菌,并用糖和Ecobot-II喂食,该糖是在2004年开发的,它使用了污泥微生物,并用死昆虫和食物浪费喂食(其他基质)。
该项目使用相同的MFC技术,也正在研究基于机器人的人造ill的水下自主权。
-
Ecobot III项目:能源自主权
- Ecobot III is an EPSRC funded project which ended in January 2007. The main objective of this project was to develop a robot with onboard fluid circulation, capable of collecting its energy from the environment and getting rid of its own waste; all of these functions are powered by the MFCs. Due to the challenging nature of this project rapid prototype technology was fully utilised in order to produce a uniquely designed, lightweight and strong robot structure comprising multiple parts. Furthermore, because of the scarcity of onboard energy, the team was required to develop ultra low power electronic circuitry to operate the robot.
The image at right shows the current ecobot team.
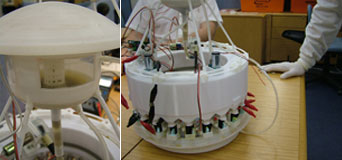
摄入/消化/e宿主(左图)
This is the upper most component of the robot which constists of the ingestion, artificial digestion and solid waste excretion mechanism. The image clearly shows sludge within the vessel and solid waste sedimented into the egester.
Sludge and Water Distribution and MFCs (right image)
This is the middle section of the robot which consists of the sludge distribution mechanism (white solid helical rings), and the MFCs (24 in total) which are shown just below the distribution mechanism. Underneath the MFCs there is an overflow collection tray which feeds back into the ingestion vessel above.
-

Towards Empathy in Humanoids
- 该项目涉及情感表现力的代理人的可信度。目的是在人形机器人头上产生面部行为,以便如果一个人与机器人说话,则该人会以一种同情的方式聆听。在这项研究中,我们将采用技术来分类人类中的动态面部表情,并在机器人中产生适当的动态表达。这将需要“思维理论”模型以及动态的情感模型。我们正在与计算机图形专家合作,他们能够从图像中提取“特征”功能,并使用它们来创建与示例集相同的行为的新颖动作序列。我们特别的兴趣在于,即使缺乏“真实”的智力,即使它缺乏心理学的幻想和理解,人们的兴趣是如何以及在何种程度上实现心理的幻想。我们旨在通过产生真正的,非重复性的面部行为来找到增强人类风味的新方法,从而传达某种潜在的情绪状态。
-
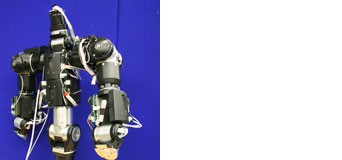
机器人示意
- This project focuses upon the production of credible conversational gestures by an anthropomorphic robot. An important part of human interaction with a robot is, for the human, that they have a feeling of engagement with an intelligent agent; one way this might be achieved is a robot that uses gestures as well as speech. Gestures are an integral part of human communication, not only for semantic content but also for evidence of speaker thought processes and engagement of the conversational partner. This will require a controller that is able to produce humanlike motions, in order to do this evolution strategy applied to a neural network is being investigated as a way to generate such a controller. The gestures themselves and their coordination with speech will be generated using a novel natural language with gesture generator (NLGG). The NLGG will provide the instructions that are to be carried out by the evolved controller. Of particular interest is how the gestures affect a person’s interactions with, and feelings towards, the robot. We will be collaborating with psychologists to carry out such an investigation, initially using hidden tele-presence control (wizard of Oz), and eventually with the fully implemented system.
-
触觉传感
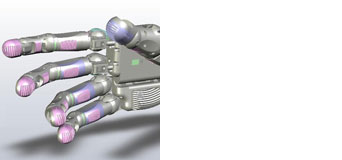
Robotic Humanoid Hand Research
- 为了与人类和他们所处的非结构化环境进行身体互动,机器人将需要准确而复杂的触觉。该项目涉及触觉机器人类人动物手的研究和设计。
We use our sense of touch to interact with each other and with our environment. It has been said that of all the senses, if lost, touch has the most detrimental effect on a person’s quality of life. With the absence of a tactile sense, humans are no longer able to control objects, or even their own limbs, without significant visual feedback and effort, as well as losing the ability to meaningfully interact and communicate with each other physically. The sense of touch is an essential part of autonomous independent existence and has a significant role in emotional interaction between humans.
将为机器人手开发的多模式触觉传感器将允许对物体进行准确的控制和操纵,并能够积极地收集有关非结构化环境中对象的信息。这项工作还将调查使用这种仪器的用手用于先进的假肢,而对于人类机器人的互动,准确的触摸感在安全中起着重要作用。
-
触觉代表项目
- 该项目旨在使用人工手指获取的摩擦学(摩擦)数据产生纹理概念。长期目标是让人造手探索一个学习和对遇到不同纹理进行分类的环境。在实现这一目标之前,正在使用专门研究纹理特征的人工纹理在人造纹理上开发质地概念的产生和育种技术。
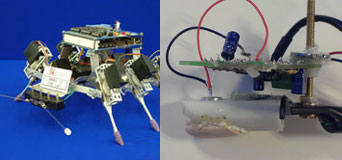
我们的手指(正确的图像)
手指是使用快速原型化机制成的,由聚碳酸盐塑料制成。与表面接触时,将麦克风凹入手指的背面以记录振动,因为手指被凹陷的环境噪声水平降低。为了提高信号与噪声比,预宽放大器的位置尽可能靠近麦克风,这导致与手指直接接触的很强信号。
Initial tests proved that the bare plastic material does not have enough friction or deformation when in contact with surfaces to adequatly record tribological data. Latex skin was added to the outside of the finger to improve the quality of recordings.
-

在群体机器人系统中学习
- 这个项目的目标是设计一个群集的罗依botic-system with desirable group behaviors. We achieve this by introducing learning ability to individuals within the group. We are interested in letting the individual robots learn to interact with each-other or their environment using rules to minimize the conflict resulting from interference, or to maximize the total income of the group for surviving. In order to explore these questions, we have designed a group of robots that perform foraging-like tasks. We chose foraging due to motivations related to biological inspirations, mostly from ant colonies.
-

信天翁无人机:动态飙升
- 信天翁利用动态飙升来跨越数千英里的开阔海洋。该项目旨在利用动态飙升来克服小型无人机(UAV)的耐力限制。先前的研究确定了开路控制法律,但为了有效地使用实际飞机,需要制定封闭的循环控制法。我们打算使用智能控制来使用强化学习来识别这种封闭的循环控制法。该项目的第二个方面是技能转移。最初,出于明显的安全性和成本原因,将使用模拟进行控制器培训。之后,学习的控制定律将与真正的滑翔机一起使用。
-

飞羊:集体运动
- The principle aim of this research is to develop a set of collective minimalist movement algorithms for use on a group of flying autonomous robots. A group of physical robots has been designed and constructed and have been used to demonstrate how swarming and homing in three dimensions can be achieved using only simple rules. The robots employ helium balloons (blimps) and therefore have a limited payload for the propulsion, communication and localisation systems. This inspiration comes from social insects that employ only local sensing and communication and do not directly communicate with all group members.
-

Whiskerbot: Tactile Sensors
- 2005年,我们与谢菲尔德大学的自适应行为研究小组开始了一个合作项目。该研究由EPSRC资助,被称为Whiskerbot研究了一种仿生人造晶须系统,该系统可以提供一种新型的机器人触觉传感器,能够纹理歧视和物体识别。该项目涉及在移动机器人上安装一系列主动控制的人造晶须,该机器人将输入大鼠大脑中感觉途径的生物准确计算模型。











