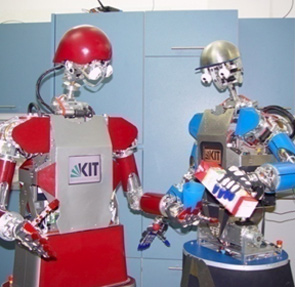
抓握动作的计划和执行 抓取和操纵使类人机器人能够与环境进行交互,因此抓取动作的规划和执行对于机器人在日常环境中的应用是非常重要的。因此,我们正在研究赋予我们的人形机器人这种不可或缺的能力的方法。我们正在为抓取和操作任务所需的三个主要任务开发综合方法:抓取规划、解决冗余机械手的逆运动学和无碰撞运动规划。具体研究了仿人机器人抓握规划、抓握动作表征和仿人抓握等问题。此外,我们正致力于整合不同的抓取相关方法,这些方法是由我们的合作者在研究界开发的,以赋予我们的人形机器人抓取不同类别的已知和未知物体的能力。由于机器人无碰撞轨迹的确定必须以快速和可靠的方式完成,因此考虑到环境的变化,我们的方法基于随机算法,如快速探索随机树(RRT)。规划无碰撞运动的方法使我们的类人机器人能够单手或双手抓取指令,重新抓取物体,并实现人工操作任务。此外,我们正在研究综合运动规划方法,将规划抓取运动的三个主要任务结合到在线规划概念中:寻找可行的抓取、求解逆运动学和搜索无碰撞轨迹的位形空间。此外,还开发了多机器人规划器,允许同时执行合作抓取动作。在仿真和仿人机器人ARMAR-III上对这些方法进行了评估。 To allow an robust execution of graping and manipulation motions, Visual Servoing techniques are applied for accurate positioning of the hand.