类别
机器人
21日xx
大厅地图/类别
大厅26
以前的
...特文特大学
A5:密歇根大学
Hstar技术……
下一个
以前的
下一个
导航:
EXPO21XX
>
机器人21 xx
>
H26:医疗机器人
密歇根大学
密歇根大学
概述
业务概况
详细联系方式
网站
发送电子邮件
分享:
视频
载入播放器…
提供配置文件
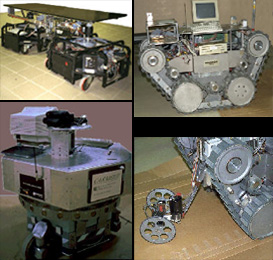
移动机器人实验室开发并制作实验移动机器人系统的原型,包括创新移动机器人、避障系统、定位系统和残疾人机器人辅助设备。
产品组合
创新的移动机器人
参数的机器人
更多信息
UM的多自由度(MDOF)车辆完全是全方位的(可以向所有方向行驶并同时旋转)。
独特的,专利的兼容联动吸收瞬时控制器误差,以避免车轮滑移。
执行器故障恢复:
即使在电机、功率放大器或其他关键部件故障后,车辆也可以远程移动和控制。
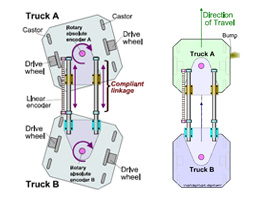
克拉珀
更多信息
澳大开发了一种新的里程计误差校正方法,该方法在澳大的MDOF车辆上实现,现在被命名为“带有位置误差校正的兼容联动自动平台”(CLAPPER)。
CLAPPER使用冗余编码器不断测量两个“卡车”的相对位置和方向。
每辆卡车都可以检测并纠正另一辆卡车的里程表误差。
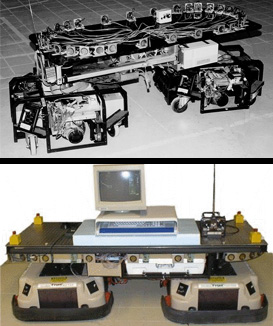
OmniMate
更多信息
1995年,橡树岭国家实验室(ORNL)为他们的“移动制图器”项目需要一个高度精确的移动机器人。
ORNL发现,市面上的机器人都不符合要求,而UM的CLAPPER接近要求。
HelpMate机器人公司和UM制造了第一台商用CLAPPER,称为OmniMate。
OmniTread
更多信息
OmniTread蛇形机器人被设计用于穿越极其复杂的地形,如倒塌建筑的废墟。
OmniTread还可以在沙子和岩石上行驶。它可以穿过小洞,爬过高高的障碍。
创新:
使用气动波纹管进行关节驱动。风箱是强大的,自然顺应,并占用最小的空间。
最大的覆盖所有部分的所有方面与特别宽的移动轨道。
独特的气动控制方法允许同时比例控制刚度和关节角度。
“传动轴脊柱”由中心部分的单个电机提供动力。脊柱贯穿所有节段的中心,为所有轨道提供扭矩。
赛格威RMP
更多信息
我们从DARPA MARS项目获得了一个赛格威机器人移动平台(RMP)
我们配备了赛格威RMP与我们的精密FLEXnav本体感知*位置估计(PPE)系统。
*)"本体感受"的意思是"没有外部参考"
我们为赛格威配备了避障功能。
避障
卡梅尔
更多信息
CARMEL是澳大最古老的移动机器人;自1987年以来。
VFH避障方法开发试验台。
VFH应用广泛。
VFH补偿了超声波传感器的不准确性。
我们相信VFH是迄今为止证明最快的避障方法。
EERUF
更多信息
多声纳的问题:一个传感器从其他传感器拾取回声;登记错误的阅读。
•大多数系统在发射下一个声纳前等待很长时间Þ慢传播速度。
•UM开发了专利的消除误差快速超声烧制(EERUF)。
EERUF声纳可以快速发射,以4英尺/秒的速度生成避障数据。
OmniNav
更多信息
OmniNav是一种为非点式全向移动机器人提供避障的新方法。
•对于点状机器人,问题比避障更困难。
•UM目前正在研究基于多个VFH“启动”点的方法的可行性。
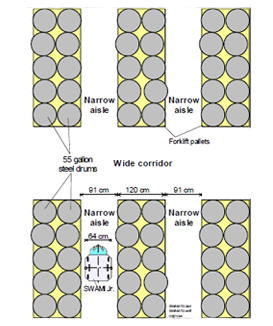
AisleNav
更多信息
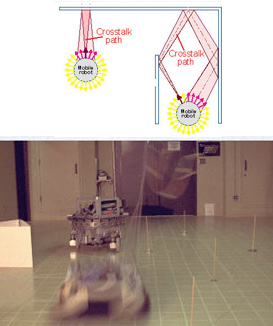
•UM开发了一种移动机器人通过狭窄通道的新方法。
•关键要求:通道内的入口、出口和旅行必须100%无碰撞
•声纳很难满足要求,因为镜面反射和串扰会导致错误的距离读数。
•UM的解决方案基于:
•优化传感器的位置
•只有精确的径向范围用于伺服读数。
•仅用于“是/否”决策的不准确的范围读数。
Tacitical移动机器人
更多信息
1998年,我们将VFH/EERUF避障技术移植到所谓的战术移动机器人(TMRs)上。
在这个darpa资助的项目中,我们为移动机器人在恶劣环境中工作开发了高可靠的避障方法。
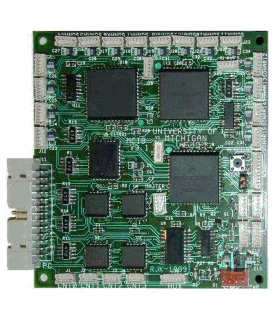
微控制器接口板
更多信息
在TMR项目的过程中,EERUF方法的小型硬件实现显然对小型移动机器人有很大的好处。
•因此,我们在软盘大小的板上实现了EERUF和其他功能。
由于其他移动机器人研究人员的强烈兴趣,我们已经将MCIB商业化。
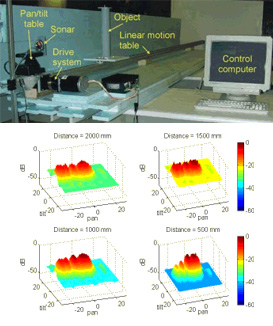
避障实验
更多信息
包括一个电脑控制电机驱动的4米直线运动桌和一个固定的平底/倾斜桌。
物体(=障碍物)可以被扔向安装在平底锅/倾斜桌上的障碍物回避传感器(如声纳)(反之亦然)。
在完全受控的动态条件下,允许精确再现动态障碍检测条件。
独特的试验台,可能在美国只有一个
移动机器人定位
UMBmark
更多信息
UM开发了移动机器人里程表精度的基准测试,称为“UMBmark”。
UM使用ummark测试了六种不同的车辆配置:
TRC LabMate,差动驱动。
Cybermotion K2A同步驱动器。
克拉珀参数。
Remotec Andros,追踪车辆。
安德罗斯编码器拖车。
智能编码器拖车(模拟)。
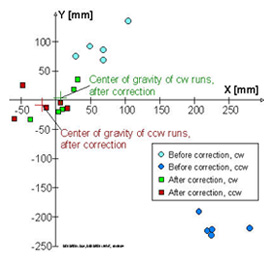
校准
更多信息
澳大开发了一种新的移动机器人校准方法
基于ummark的方法。
适用于差速驱动车辆(如LabMate)。
将系统误差降低一个数量级。
方法可完全自动应用。
方法经其他研究人员验证。
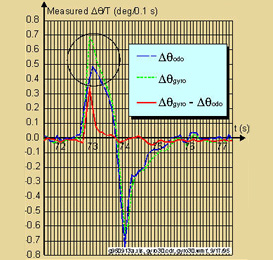
Gyrodometry
更多信息
其他问题:地面上的凸起或裂缝会导致里程表测量的大误差。
澳大正在开发减少这种“非系统”错误的新方法。
UM最近的发展:“陀螺测量”。利用陀螺仪的数据来检测和纠正非系统误差。
导航的书
更多信息
1994年,ORNL要求提交一份关于移动机器人定位方法的报告。
作为回应,澳大调查了相关文献,与公司进行了交流,并制作了同类调查中最全面的“我在哪里”报告。
由于这份报告的重要性,它是:
以书籍形式出版,
发表在cd - rom,
并完整地发布在互联网上。
陀螺标定
更多信息
UM开发的精确校准方法
光纤陀螺仪。
提供10倍的精度比制造商的原始陀螺。
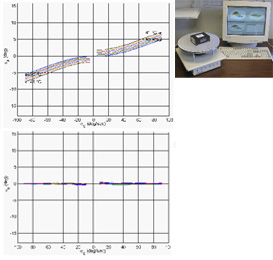
图片描述:
上图:
陀螺校准:典型的陀螺输出误差与制造商的原始校准
底:
应用澳大的新校准方法后,误差减少了一个数量级以上。
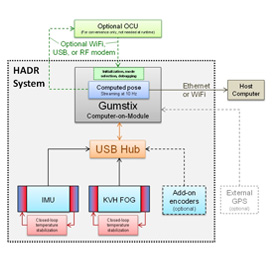
高精度船位推算系统
更多信息
HADRS的主要特性
适用于任何轮式或履带式地面车辆。
适用于任何地形,包括崎岖,陡峭的倾斜地形。
只需要一个电源连接和车轮/轨道编码器数据从主机车辆。此外,系统还可以使用我们可改装的附加编码器的编码器数据,使其独立于主机车辆编码器。
没有GPS,计算机视觉,信标,或任何其他外部参考,但可以容纳和集成可选的外部GPS。
对环境漠不关心:室内、室外、城市或农村。
体积小,可以放入1/3 Packbot有效载荷舱(正在开发的rev.2更小:6.23x2.87x3.25英寸)。
设计为最小的功耗。
输出与JAUS兼容的时间戳X、Y、Z和10hz的航向数据流。
通过以太网、WiFi、射频或远程射频数据调制解调器输出数据。
不受极端工作温度或工作温度突然变化的影响。
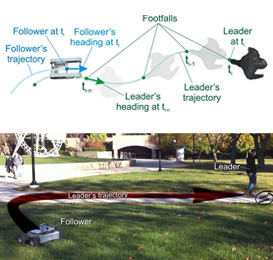
被领导导航
更多信息
目的:
让移动机器人跟随行走的人类领导者
没有GPS,也没有视线
工作原理:
领导者使用我们的个人死亡推算(PDR)系统。
追随者有航迹推算能力(通常:IMU和里程计)。
两个航迹推算系统通过射频调制解调器通信。
我们的Leader-Follower方法同步了两个航迹推算系统。
预期的性能:
在任何环境下,跟随者可以不受时间限制地跟踪领导者。
追随者可能会落后于领导者2-60秒。不需要视线。
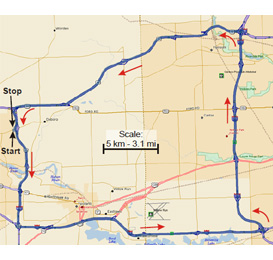
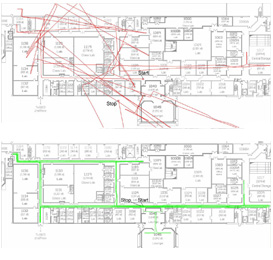
遥控ugv的室内精确跟踪
更多信息
目的:
为远程操作UGV提供类似gps的视觉轨迹,以方便在建筑物内驾驶UGV。
工作原理:
使用低成本的陀螺和UGV内置的里程表。
使用我们正在申请专利的启发式漂移消除(HDE)方法来消除所有陀螺误差的影响,包括陀螺漂移。
不需要GPS,射频信标或基准。
性能:
在无限持续时间的运行中零头错误!*
平均位置误差<行进距离的1% !*
NASA火星探测器2009
更多信息
美国国家航空航天局资助的一个项目,旨在为2009年火星漫游者任务开发高精度航迹推算系统。
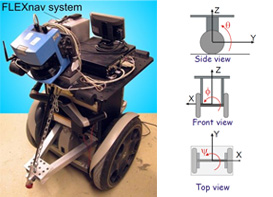
我们建造了“Fluffy”,一个完全功能的NASA fido级火星漫游者的1/2比例的克隆体。
我们在Fluffy上实现了基于模糊逻辑专家规则的导航(FLEXnav)方法。
我们针对砂土上独特的车轮滑移条件对FLEXnav系统进行了优化。
主要创新:
车轮滑移检测与滑移监测修正
启发式漂移减少
更多信息
许多车辆跟踪系统使用GPS作为主要传感器,陀螺加里程计作为次要传感器。后者帮助计算车辆在GPS中断时的位置。
这种方法的问题是低成本陀螺仪有很高的漂移率,这导致在短短几秒钟或几分钟后就有很大的航向误差。
Heuristic Drift Reduction (HDR)基于经过测试和验证的启发式方法估计陀螺的瞬时偏倚漂移,然后从陀螺的输出中减去估计的漂移。
结果是有效漂移的显著减少,这导致了两个数量级的低航向误差!
HDR完全不需要硬件。它是一个小的软件段,可以添加到任何现有的程序代码。
HDR适用于任何陀螺仪或IMU;它对低成本/高漂移陀螺仪最有效。
行人跟踪
室内行人跟踪
更多信息
操作原理:脚装式IMU
特性
记录和传送行走或爬行者的位置。
消除每一步加速度计漂移的影响。
采用正在申请专利的启发式漂移消除(HDE)算法来消除MEMS陀螺灵敏度对线性加速度和漂移的影响。
适合行走/慢跑/爬行/向前/向后/侧向/任何方向跳跃。
性能
在无限持续时间的行走中,平均头球错误接近零!
平均位置误差<行走距离的1% > 30分钟
平均仰角(z轴)误差< 1 m。
户外行人Trackin
更多信息
操作原理:脚装式IMU
特性
记录和传送一个行走的人的位置。
不需要GPS。
不需要信标或任何其他外部引用。
消除每一步加速度计漂移的影响。
不需要用户特定的校准*。
实时记录和(无线)传输位置数据。
性能
上升2英里时的平均位置误差:约为行进距离的0.5%。
上升2英里时最大的位置误差:< 40米。
室内赛格威跟踪
更多信息
启发式增强里程计(HEO)在室内结构化环境中使用时消除了里程计航向误差。
特点:
不需要任何传感器以外的轮编码器里程表。
不需要信标或任何其他外部引用。
实时工作,只需要20-30行C代码。
在无限持续时间和距离*的驱动器中提供接近零的航向错误。
提供位置误差<1%的移动距离*。
机器人辅助残疾人
NavChair
更多信息
澳大为重度残疾用户开发了“导航椅”。
由于震颤或其他限制,一些使用者不能用操纵杆准确控制轮椅。
NavChair的避障功能克服了以下问题:
用户用操纵杆给出大致的移动方向;NavChair遵循这个方向。
当遇到障碍物时,导航椅会绕过障碍物,同时尽量保持用户指定的方向。
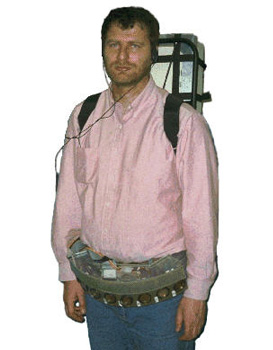
NavBelt
更多信息
与导航椅类似,澳大为盲人开发了“导航带”。
使用澳大的避障功能:
•NavBelt不向机器人控制器发出转向信号,而是通过耳机产生声音信号传递给用户。
NavBelt的限制:
需要数百小时的训练,用户才能及时对声音信号做出反应,即使是在缓慢的行走速度下。
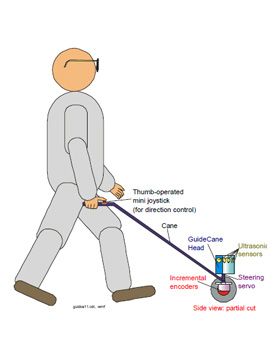
GuideCane
更多信息
有前景的盲人引导解决方案:UM的“GuideCane”,具有基于超声波传感器的障碍物回避
绕过了障碍
转向动作立即被用户感觉到,然后遵循由被操纵的传感器头规定的改变的路径。
GuideCane的主要优点:
全自动避障
完全直观的操作,完全不需要训练。
通过结合里程计、罗盘和陀螺仪数据来维护位置信息。
大厅地图/类别
大厅26
以前的
...特文特大学
A5:密歇根大学
Hstar技术……
下一个
以前的
下一个