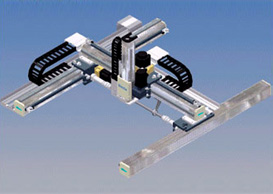
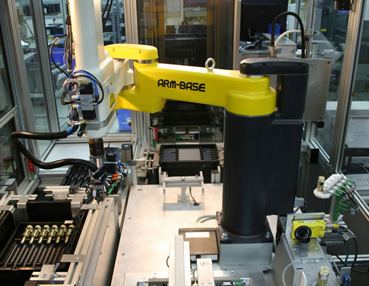
平田正在生产各种类型的机器人。机器人主要有两种结构:SCARA机器人(关节臂)和笛卡尔机器人。
根据客户的需要和应用要求,您随时可以从不同的型号和类型中选择出最佳的解决方案。
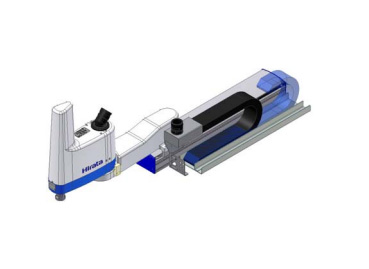
自1978年以来,平田公司不仅提供独立的机器人,还提供传送带、送料器和整个合适的机器人系统。
我们为您的需求创造最佳的自动化系统,提供全面的技术和工程支持。我们正在规划、设计和建设这个系统。最后,我们的自动化专家已经准备好安装系统并指导您的操作人员。
您有一个当前的自动化项目-不要犹豫与我们联系。
对于一些典型的需求,我们有半标准化的解决方案,如焊接机器人、堆垛机和异形电子元件的插入机器人。

| 机器人模型: | 2 x AR-S270 |
| 托盘馈线模型: | ast - 700 - 50, ast - 700 - 50 - r |
| 托盘尺寸: | 400毫米× 300毫米 |
| 托盘材料: | 塑料,深拉伸,0.7毫米厚 |
| 周期时间: | 每个工件3.0s |
| 有效载荷: | 200克 |
系统描述
该系统由两个托盘给料机和两个SCARA机器人组成。托盘给料机与空托盘堆的传送带连接在一起。此外,托盘给料机还设有缓冲段,以增加缓冲容量。
深拉盘是由非常薄的材料制成的,这是一个很大的挑战。因为托盘不能固定形式配合,但它必须通过真空夹具固定。

| 机器人模型: | AR-S350 |
| autostocker模型: | AST-700/900D-50-R |
| 托盘尺寸: | 400毫米× 300毫米,540毫米× 360毫米 |
| 托盘材料: | 塑料,深拉伸,1.2毫米厚 |
| 周期时间: | 2,每个工件8秒 |
| 处理重量: | 30克 |
系统描述
该系统由双托盘送料器和SCARA机器人组成。由于原料件的托盘尺寸为400mm × 300mm,成品试片尺寸为540 mm × 360mm,所以每个给料机都是针对一定的托盘尺寸设计的。此外,该系统还配备了视觉系统,以纠正机器人在工件输送机上的位置。

| 机器人模型: | AR-S270 |
| autostocker模型: | ast - 700 - 50 - r |
| 托盘尺寸: | 400毫米× 300毫米 |
| 托盘材料: | 塑料、硬泡沫 |
| 周期时间: | 每个工件2s |
| 处理重量: | 20克 |
系统描述
该系统由一个标准的托盘反流式送料器和SCARA机器人组成。托盘的大小不同取决于400毫米× 300毫米和450毫米× 450毫米之间的产品。托盘给料机通过部件互换,可适应不同托盘尺寸。

| 机器人模型: | AR-S550 |
| autostocker模型: | ast - 900 d - 50 |
| 托盘尺寸: | 600mm × 400mm |
| 托盘材料: | 塑料,深拉伸,5毫米厚 |
| 周期时间: | 3 s每个工件 |
| 处理重量: | 70克 |
系统描述
该系统由一个双托盘加料器和一个SCARA机器人组成。每一半托盘馈线连接在一起,由传送带将成堆的空托盘从一个馈线到另一个。因此,手工处理空托盘被省去。此外,成堆的满托盘饲料和出由一辆车。

| 机器人模型: | AR-S550 |
| autostocker模型: | ast - 700 - 50 l - - tz |
| 托盘尺寸: | 600mm × 400mm |
| 托盘材料: | 塑料,深拉伸,5毫米厚 |
| 周期时间: | 每个工件3.0s |
| 处理重量: | 20克 |
系统描述
改进了托盘给料机的标准设计,使系统符合标准化的流水线模块。托盘给料机具有相当平坦的延伸,用于将托盘进进出出送入组件模块。

| 机器人模型: | CRWQ-H2020 |
| autostocker模型: | ast - 900 - 50 - r |
| 托盘尺寸: | 600mm × 400mm |
| 托盘材料: | 塑料,深拉伸,抗静电,4毫米厚 |
| 周期时间: | 每件15秒 |
| 处理重量: | 120克 |
系统描述
该系统由一个标准托盘料仓和一个笛卡儿机器人组成。另外,在这台机器中机器人进行操作。该机器人应用导热浆料,并测量pcb放置的外壳的重要点。

| 机器人模型: | --- |
| autostocker模型: | ast - 900 - 50 |
| 托盘尺寸: | 600mm × 400mm |
| 托盘材料: | 塑料,深拉伸,5毫米厚 |
| 周期时间: | 每件20英镑 |
| 处理重量: | 400克 |
系统描述
原料的完整托盘由托盘给料器中的一个小推车提供。推车的设计是特殊的,以适应作为托盘给料器的一部分,如果推车是附在给料器。

| 机器人模型: | --- |
| autostocker模型: | ast - 900 - 50 |
| 托盘尺寸: | 600mm × 400mm |
| 托盘材料: | 塑料、KLT盒子 |
| 周期时间: | 每个工件12秒 |
| 处理重量: | 75克 |
系统描述
该系统由一个标准的托盘给料器和几个缓冲段和一个额外的装置定位盒子的镶嵌。本托盘给料机是根据动机客户的强烈规格制造的。




| 机器人模型: | CRWQ-H 2010 |
| 工件尺寸: | 400mm × 400mm |
| 工件: | 风扇控制 |
| 周期时间: | 每件15秒 |
| 有效载荷 | 800克 |
系统描述:
笛卡尔机器人处理探针并将其移动到位于工件载体上的工件上。工件载体通过输送系统进进出出。机器人控制器与测试计算机通信,控制整个单元。
| 机器人模型: | AR-S 550 |
| 托盘馈线模型: | AST 700 |
| 托盘尺寸: | 400毫米× 300毫米 |
| 托盘材料: | 深吸引塑料 |
| 周期时间: | 每个工件16先令 |
| 有效载荷: | 200克 |