- 提供配置文件
- 哈佛生物设计实验室汇集了来自工程、工业设计、医疗和商界的研究人员,开发智能医疗设备的技术。这些技术受到人类生物力学实验结果的启发,其发展受到临床医生在手术室中了解未满足需求的时间的影响。实验室成员与Wyss研究所的工业合作伙伴和技术专家密切合作,将这些技术转化为满足现实医疗需求的产品。
产品组合
软Exosuits
- 我们正在开发下一代柔软可穿戴机器人,使用创新的纺织品提供更适形,不突兀和顺从的方式来连接人体。这些机器人将增强健康人的能力(例如提高行走效率),除了帮助肌肉无力或患有身体或神经疾病的患者外。与传统的外骨骼相比,这些系统有几个优点:穿戴者的关节不受外部刚性结构的约束,穿着的部分非常轻。这些特性最大限度地减少了宇航服对人体自然生物力学的无意干扰,并允许与穿着者进行更多的协同互动。
-
-
-
结构功能性纺织品
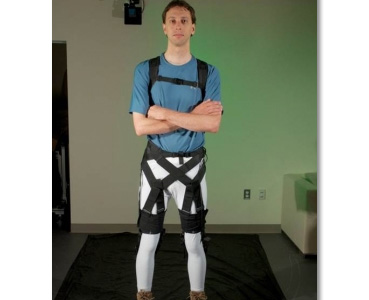
- 我们正在创造创新的纺织品,灵感来自对人类生物力学和解剖学的理解。这些可穿戴的服装提供了传递辅助扭矩到穿戴者关节的手段,而不使用刚性的外部结构。为了获得高性能的软质外服,在设计过程中需要考虑一些因素。外服应该安全舒适地附着在身体上,并通过有益的途径将力传递到身体上,以便在关节处产生生物学上合适的力矩。此外,这些服装可以被设计成被动地(没有主动动力)产生辅助力,这是由于在特定任务中穿着的自然运动。外服的一个关键特征是,如果驱动部分延长,则可以增加服装长度,从而使整个服装松弛,此时穿着外服就像穿着一条裤子,并且不会对穿着者产生任何限制。
-

-
轻便高效的驱动
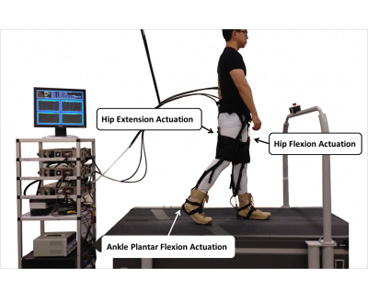
- 为了通过软界面提供主动辅助,我们正在开发一些驱动平台,可以通过附着在可穿戴服装的锚定点对穿戴者施加受控力。我们正在开发轻量化和全便携式系统,我们方法的一个关键特征是,我们通过更近端安装的驱动系统和将动力传输到关节的灵活变速箱,最大限度地减少附着在佩戴者身上的远端质量。虽然我们最近的大部分工作都是在电缆驱动的机电方法上,但我们也在追求基于气动的方法。2013年McKibbon执行器的早期工作首次证明了柔软的外服可以对机动性产生积极影响。
-

-
可穿戴式传感器
- 为了正确地控制和评估软外套,需要易于与纺织品和软组件集成的新型传感器系统。刚性外骨骼通常在机器人关节中包含编码器或电位器等传感器,可以准确跟踪关节角度,但这些技术与软结构不兼容。我们的方法是设计新的传感器来测量人体运动学和服装与人的交互作用力,这些传感器健壮、顺从、经济有效,并易于集成到可穿戴服装中。此外,我们使用其他现成的传感器技术(例如陀螺仪,压力传感器,IMU),可用于检测步态周期中的关键事件。这些可穿戴传感器可作为可穿戴机器人控制策略的一部分,也可用于监测和记录穿戴者的运动(当穿着外服或作为独立的传感器服时),以跟踪随时间的变化或确定他们正在进行的活动(例如步行vs跑步)。
-
-
直观和鲁棒的控制
- 我们还在快速开发可重构的多致动器系统,为基于实验室的研究提供更大的灵活性。这种方法使我们能够快速探索围绕人机交互的基础科学,然后可以用来指导我们的便携式系统的设计。健壮、直观和自适应的人机界面是可穿戴机器人与穿戴者协同交互的必要组成部分。我们的重点是以一种不破坏自然、被动动态的方式提供帮助,这种动态使行走或跑步如此高效。为了实现这一点,我们开发了非侵入性估计意图的方法,以便任何应用的驱动都能帮助适当的生物肌肉。我们的方法的一个关键特点是利用集成传感器来监测穿戴者与与身体接口的柔顺纺织品的相互作用,以及其他传感器来检测步态周期中的关键时刻。
-
-
实验生物力学
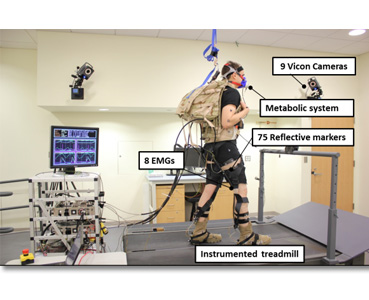
- 我们的动作捕捉实验室使用Vicon t系列9摄像头系统进行动作捕捉,以及Bertec全仪表分带跑步机来测量grf。通过比较三种情况下每个关节的平均轮廓和活动范围,我们可以确定软外服本身是如何影响步态的,以及外服施加的辅助是如何改变运动学的。我们的假设是,这种变化是最小的,在任何情况下都不破坏自然步态是可取的。我们通过分析步态动力学和动力学(关节力矩、功率、外服传递的力)来研究主动外服在多大程度上帮助了人类。逆动力学是一种有效的方法,可以确定外服在关节水平上增强身体功能的程度。通过比较关节力矩和服装辅助力,我们可以监测用户和机器人之间的同步程度。表面肌电图(表面肌电图)可用于选择性地监测肌肉活动,重点关注与所考虑的任务最相关的肌肉群。比较无动力、有活动和无套装条件下表面肌电活动的整体平均剖面,我们可以确定对每块肌肉传递的最大力(表面肌电峰值激活)和每块肌肉激活的能量消耗(积分表面肌电)的影响。我们使用行走的代谢成本作为一项整体生理测量,以确定该服装在多大程度上帮助了穿戴者,以及这种帮助是否抵消了该设备的重量。
-
-
转化应用
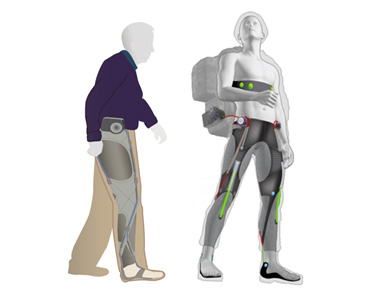
- 除了我们在基础研究和系统开发方面的工作外,我们对我们的软可穿戴机器人的应用非常感兴趣。通过DARPA资助的工作,我们对开发能够帮助士兵在携带重物时行走的外服感兴趣。我们相信,我们可以创造出被动和主动的系统,减轻腿部肌肉和肌腱的高压力,从而降低受伤的风险,提高佩戴者的行走效率。我们小组的另一个翻译重点是医疗应用中的步态辅助。我们预见柔软的外服能够恢复肌肉无力(如老年人)或患有神经系统疾病(如中风)的患者的活动能力。除了我们的主动系统之外,我们还设想了在体育和娱乐领域的转化潜力,在步行、徒步旅行、跑步和其他活动中,完全被动的功能性纺织品软服可以提供少量的辅助。
柔软的机器人
-
-
-
多材料流体驱动器
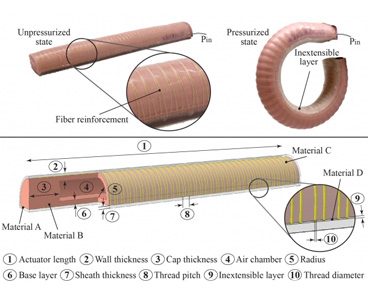
- 由嵌入柔性材料(如布、纸、纤维、颗粒)的弹性矩阵组成的软流体执行器是机器人界特别感兴趣的,因为它们重量轻、价格合理,易于针对特定应用进行定制。这些执行器可以在多步成型过程中快速制造,并可以通过简单的控制输入(如加压流体)实现收缩、伸展、弯曲和扭转的组合。我们的方法是使用新的设计概念、制造方法和软材料来提高这些执行器的性能,与现有设计相比。特别是,我们使用激励应用程序(例如心脏辅助设备,软机器人手套)来定义运动和力剖面需求。然后,我们可以将机械智能嵌入到这些软执行器中,通过简单的控制输入来实现这些性能要求。
-
-
软执行器建模
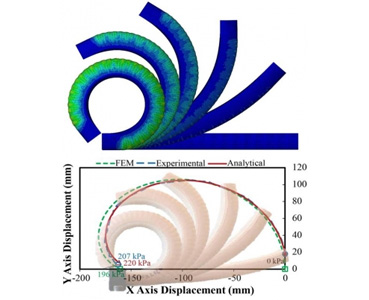
- 由于超弹性材料和它们产生的大弯曲运动的非线性性质,表征和预测软多材料驱动器的行为是具有挑战性的。我们正在努力通过分析、数值和实验方法全面描述这些执行器的工作原理,并将其输出(运动和力)描述为输入压力以及几何和材料参数的函数。模型和实验都可以深入了解执行器的行为和影响它的设计参数。我们设想这项工作将导致改进的预测模型,使我们能够迅速收敛到这些软执行器的新的和创新的应用。
-
-
传感与控制
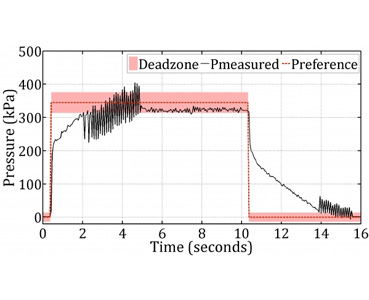
- 为了控制软执行器,我们需要监测它们的运动学、与环境中物体的相互作用力和内部压力的手段。我们通过使用与合作者开发的全软传感器和可在制造过程中纳入执行器设计的微型或柔性传感器来实现这一目标。在动力和控制方面,我们使用电子阀门、泵、调节器、传感器和控制板等现有组件,通过压力、运动和力的反馈控制,快速调节执行器腔室内的压力。此外,我们可以使用我们开发的分析模型来估计可能难以直接测量的状态变量。
-

-
转化应用
- 目前,美国约有400万慢性中风患者患有偏瘫,全球发达国家约有600万。此外,还有数百万人遭受着类似的痛苦。对于这些病例中的大多数,观察到手部运动能力的丧失,无论是部分的还是全部的,这都会极大地抑制日常生活活动(ADL),并会大大降低一个人的生活质量。为了应对这些挑战,我们正在开发一种模块化、安全、便携式、消耗性的家用手部康复和辅助设备,旨在以更低的成本大幅增加治疗的数量(即时间)和质量,从而改善患者的治疗结果,同时通过使慢性手部残疾患者能够进行日常生活活动,提高他们的独立性。
在美国,心脏衰竭的终生风险约为20%。目前的临床标准治疗方法是植入与患者血液接触的心室辅助装置,该装置与血栓栓塞事件、溶血、免疫反应和感染有关。我们正在应用软机器人领域来开发一个台式心脏模拟器和一个直接心脏压缩(DCC)设备,该设备采用弹性矩阵中的软执行器。DCC是一种非血液接触的心脏辅助方法,用于治疗心力衰竭,包括植入一个环绕心脏的装置,并与本机心跳同步收缩,在心脏周期的喷射期(收缩期)和舒张期(舒张期)提供直接的机械辅助。
相关文章
-

-
沃尔什推动可穿戴机器人的设计
-
- 波士顿剑桥/质量。2014年9月11日消息,哈佛大学威斯生物激励工程研究所今天宣布获得美国国防高级研究计划局(DARPA)授予的第一阶段290万美元的后续合同,以进一步开发一种生物激励智能服。这种名为“软外套”(Soft Exosuit)的设备可以舒适地穿在衣服里面,使士兵能够走更远的距离,避免疲劳,并在携带重物时将受伤的风险降至最低。这种服装的替代版本最终也可以帮助那些行动不便的人。
DARPA的“勇士网络”项目寻求开发技术,以预防和减少军事人员的肌肉骨骼损伤,但同样的技术也可以用于民用。这种损伤的减少可以降低长期医疗成本,并提高穿着这种服装的人的生活质量。
这是第一份潜在的两阶段合同,该合同使Wyss研究所核心教师Conor Walsh和他的团队能够在他们早期工作的基础上继续工作,该工作也由DARPA资助,演示了这种全新的可穿戴机器人设计和制造方法的概念验证。受到对人类行走生物力学的深刻理解的启发,软外服技术正在催生全新形式的功能性纺织品、柔性动力系统、软传感器和控制策略的发展,从而实现直观和无缝的人机交互。
“虽然可穿戴机器人的想法并不新鲜,但我们的设计方法肯定是新的,”沃尔什说,他也是哈佛工程与应用科学学院(SEAS)机械和生物医学工程的助理教授,也是哈佛生物设计实验室的创始人。
这种轻便的软外骨骼服旨在克服传统的较重外骨骼系统的挑战,例如耗电的电池组和会干扰自然关节运动的刚性组件。它由柔软的功能性纺织品编织成一件智能服装,就像一条裤子一样,可以穿在士兵的常规装备下面。通过一种受生物学启发的设计,该套装模拟了人走路时腿部肌肉和肌腱的活动,并在不限制穿着者运动的情况下,在腿部关节提供微小但精确的辅助。
在目前的原型中,一系列位于身体下半部分的带带包含低功耗微处理器和柔性应变传感器网络,它们分别充当软Exosuit的“大脑”和“神经系统”,连续监测各种数据信号,包括西装张力、穿着者的位置(例如,行走、跑步、蹲伏)等等。
“在短短几年内,康纳和他的团队将努力从根本上改变可穿戴机器人的可能模式,”唐纳德·英格伯说,他是威斯研究所的创始主任,哈佛医学院和波士顿儿童医院血管生物学的Judah Folkman教授,以及哈佛海洋研究所的生物工程教授。“他们的工作是一个很好的例子,展示了将来自多个学科的人聚集在一起,拥有集中的资源,将最初看起来像一个梦想的东西转化为可以改变人们生活的产品。”
除了军事应用,该团队还将与临床合作伙伴合作开发一种医疗版的西装,以帮助中风患者,例如,他们经常经历缓慢、低效的步态,可以极大地受益于行走辅助。
合作者包括维斯研究所和SEAS教员罗伯特·j·伍德、客座教授肯·霍尔特以及波士顿大学健康与康复科学学院的特里·埃利斯。迄今为止,这个项目成功的关键在于哈佛大学博士后(Alan Asbeck, Stefano de Rossi, Ignacio Galiana, Yigit Menguc)和研究生(Ye Ding, Jaehyun Bae, Kai Schmidt, Brendan Quinlivan)以及威斯研究所的工作人员(Zivthan Dubrovsky, Robert Dyer, Mike Mogenson, Diana Wagner, Kathleen O 'Donnell)。总部位于波士顿的新百伦(New Balance)也将成为该项目新阶段的关键合作伙伴,带来纺织和服装创新方面的专业知识。
根据与DARPA的合同条款,Wyss研究所将获得高达290万美元的“勇士网络”工作,全部资金将取决于能否达到一系列技术里程碑。
-
-
软体机器人在冰火中幸存
-
- 当涉及到软体机器人时,研究人员终于设法剪断了绳子。
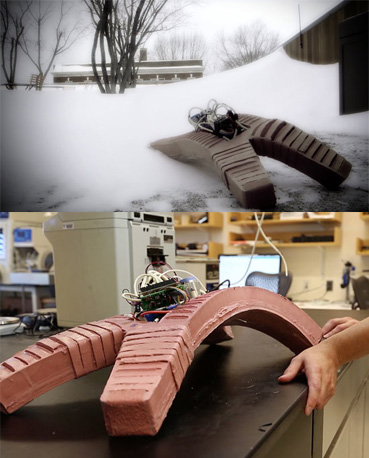
哈佛大学工程与应用科学学院和威斯生物工程研究所的开发人员制造出了第一个无系绳的软体机器人——一个可以站起来并从设计者身边走开的四足动物。
在查尔斯河工程与应用科学教授罗伯特·伍德的实验室里,包括凯文·加洛韦、迈克尔·卡佩尔森、博巴克·摩萨代格、罗伯特·谢博德、迈克尔·托利和迈克尔·温纳在内的研究人员能够扩大早期的软体机器人设计,使单个机器人背上运行所需的所有设备——微型压缩机、控制系统和电池。9月1日发表在《软体机器人》杂志上的一篇论文描述了这一设计。
“早期版本的软体机器人都是系绳的,这在某些应用中工作得很好,但我们想做的是挑战人们对机器人应该是什么样子的概念,”威斯研究所材料科学和机械工程助理研究员、该研究的第一作者托利说。“我们认为,人们决定使用金属和刚性材料制作机器人的原因是,它们更容易建模和控制。这项工作受到自然的启发,我们想证明软材料也可以成为机器人的基础。”
与早期的软体机器人相比,托利和他的同事们设计的系统非常巨大,长度超过半米,背上可以承载7.5磅的重量。
然而,设计过程不仅仅是放大小型机器人。
托利说:“一旦你开始考虑将这些基本部件(微压缩机、控制器和电池)安装到一个不受束缚的机器人上,你就需要一个可以携带这些部件的设计。”“你需要考虑可以承受更高压力的东西,所以有材料挑战、设计挑战和控制挑战。”
-
-
康纳·j·沃尔什
-
- 康纳是哈佛大学工程与应用科学学院机械与生物医学工程助理教授,也是哈佛大学威斯生物工程研究所的核心教员。他是哈佛生物设计实验室的创始人,该实验室汇集了来自工程、工业设计、服装、临床和商界的研究人员,开发新技术,并将其转化为工业合作伙伴。他的研究重点是将颠覆性技术应用于机器人设备的开发,以增强和恢复人类的表现。他目前的研究兴趣包括设计、制造和控制可穿戴机器人设备的新方法,以及通过生物力学和生理学研究表征其性能。他领导了DARPA战士网络项目的一个研究团队,开发一种可以辅助运动的柔软外服,可以为穿着者提供小程度的帮助。这种外骨骼的功能是基于对人类行走的详细了解,并且柔软柔韧,不像传统的外骨骼使用刚性部件。长期目标是开发完全便携的可穿戴机器人,以帮助残疾人和健全人,并进一步科学理解人类如何与此类机器互动。他的团队还致力于心脏应用的基于流体的软机器人的建模和设计,并将新兴的中尺度制造方法应用于智能医疗工具的设计,用于疾病的微创诊断和治疗。鉴于他在医疗设备和机器人方面的广泛兴趣,他与Wyss的员工在生物机器人和预期医疗和蜂窝设备平台上密切合作。此外,他热衷于培养未来的创新者,并建立了哈佛医疗设备创新计划,为学生提供了与波士顿和印度等新兴地区的临床医生合作的机会。 Conor received his B.A.I and B.A. degrees in Mechanical and Manufacturing engineering from Trinity College in Dublin, Ireland, in 2003, and M.S. and Ph.D. degrees in Mechanical Engineering from the Massachusetts Institute of Technology in 2006 and 2010. He has been the recipient of over a dozen invention, entrepreneurship, and student mentoring awards including the MIT $100K business plan competition, Whitaker Health Sciences Fund Fellowship, and the MIT Graduate Student Mentor of the Year.














