- 提供配置文件
- 机器人与人工视觉实验室(ROBOLAB)位于西班牙埃斯特雷马杜拉大学Cáceres。
自2000年成立以来,致力于智能移动机器人和计算机视觉的研究。
产品组合
项目及研究合约
-

APSUBA
-
- 面向场景理解和行为分析的主动感知(APSUBA):在社交机器人中的应用。
本项目旨在开发一个主动感知环境的系统,作为异构传感器网络中的代理,用于场景理解和行为分析。所提出的感知系统由两种不同的机制组成:主动视觉感知系统和度量感知系统,作用于三维激光扫描仪、惯性测量单元(IMU)和相机等异构传感器网络内。这两个系统都将进行校准。感官融合允许使用主动视觉检测感兴趣的区域(例如场景的变化,人机交互,人/机器人运动等)。度量信息将用于后期分割和3D建模阶段。此外,数据融合将应用于异构传感器的校准和感知。最后,这些模型将用于场景识别和行为理解。为了获得场景中的相关元素,将采用基于感知的分组过程,该过程由分层不规则金字塔进行。利用视觉机制给出的信息,度量感知系统将通过开发基于多层同形图的重建方法,提供感兴趣领域的三维信息。大数据集的分割将使用高斯混合模型(GMM)提供的聚类来实现。 These segments will be modelled using high level geometric features (superquadric surfaces), which will be used for the last stage of the system: scene understanding and behaviour analysis using Bayesian rules.
该项目将在移动结构传感器网络、异构传感器校准、定位、场景识别、3D重建、主动感知、感官融合或人类行为理解等不同主题上做出贡献。这个项目的结果在其他研究领域(如智能环境)也很有趣。
-

在
-
- ACROSS(用于社会服务的自动配置机器人)旨在将机器人服务整合到社会场景中,通过改善人与实体代理之间的沟通和同理心,使它们能够预测用户需求。
单一战略科技项目由“一组研究、发展和创新(R&D)活动,旨在加强代理商的科技整合和促进技术转让,有助于提高企业的技术能力”。
-
RoboComp
-
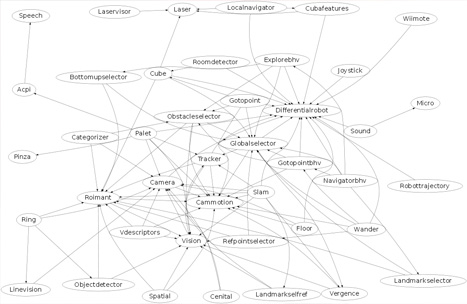
- RoboComp是一个开源机器人框架。它由不同的机器人软件组件和使用它们的必要工具组成。运行的组件形成进程图,可以使用软件组件技术分布在多个内核和CPU上。通信由Ice框架处理,遵循Orca2机器人系统采用的方法。我们设计系统的主要目标是高效、简单和可重用性。RoboComp还在它的一些组件中使用其他工具,如CMake, Qt4, IPP, OpenSceneGraph和OpenGL。项目中使用的编程语言主要是c++和Python,但Ice框架可以轻松使用用许多其他语言编写的组件。RoboComp,作为ROS,也可以被称为机器人操作系统,只要它为机器人硬件提供一个抽象层。
与其他类似的项目(如Orca或ROS)相比,Robocomp的主要优势在于它的效率和易用性。
-
RobEx
-
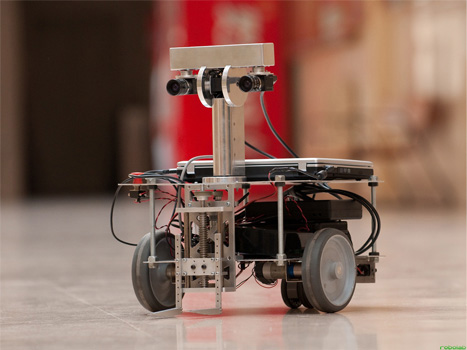
- Robex,我们新的移动机器人原型准备好了!它是Speedy的进化版,采用了新的底盘几何形状和新的Wifi-N连接。运动由两个带有HP编码器的Maxon直流电机完成。
它们由下面描述的AtMega32微控制器驱动的定制3安培PWM放大器控制。该板计算2KHz的两个PID回路,并通过I2C总线读取2Hz的电子罗盘。
罗盘和电机控制器可以耦合在一个高阶回路中,以遵循外部命令的磁方向。在前面,我们放置了一个URG激光-4米范围和0.5度角-也通过USB端口连接。
另一个微控制器板控制立体头部的三个伺服器,其中包含两个ISight火线摄像机。还有一个控制着定制的“前庭”板。
机器人
-
ROADEX
-
- 人类的视觉提供了从外部世界接收到的大部分信息。毫无疑问,拥有这种感官能力的机器人比缺乏这种能力的机器人能克服更大的挑战。传统上,人工视觉研究与机器人控制研究之间存在一定的解耦。在第一组中,主要的努力集中在从一个或多个场景视图获得的感官信息中产生对世界的符号和/或几何解释。尽管在这方面取得了许多进展,但这种孤立的视觉感知概念并没有在机器人技术中产生预期的结果。此外,若干研究越来越有力地表明,感知与行动密切相关,因此不应被视为一个单独的过程。为了在视觉感知和动作控制之间建立适当的联系,有必要回答两个基本问题:如何在感知过程中包括动作的影响?如何根据感知来调节行为?我们提出的主要假设是,这两个问题可以通过关注来解决。更具体地说,我们的建议的基础是,注意作为感知和行动之间的连接手段,它允许根据行动驱动感知过程,并根据注意控制的感知结果调节行为。 Based on this idea, we have successfully developed a control architecture that allows solving navigation tasks in an autonomous mobile robot with stereo vision. The main objective of this project is to expand the control architecture of our robots to give them the ability to know and recognize their environment. The new system is a process of visual SLAM (Simultaneous Localization And Mapping) to be integrated into the architecture as a new behavior, acting effectively with other behaviors to support the overall control and to allow the robot to adapt to its environment . This new behavior will keep the attentional philosophy of the system, which will provide it the capability to act in both active and passive ways. On one hand, in a situation where the environment is unknown, the SLAM behavior will behave actively, guiding attention and actions of the robot to explore the environment and to build an internal representation of it. Faced with a family environment, the SLAM behavior will remain in a passive state while other behaviors act. In such a situation, its processing activity will be dedicated to remain localized and to update any change produced in the environment by using the previously obtained representation and the information provided by the visual attention system. These two ways of self-localization allow the robot to adapt progressively to its environment, without prior knowledge about it. Moreover, this adaptation only takes play from the interaction between the robot and the environment. As a result, the robot will act effectively in any area without the need to be reprogrammed or explicitly adapted.
-
洛基
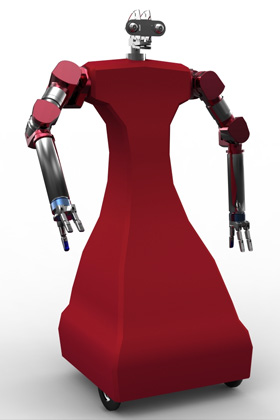
- 机器人洛基是由几所西班牙大学和公司合作建造的AMM,由UEX设计和协调。该机器人是一个先进的社交机器人研究平台。Loki的移动底座包含电池、能源管理电子设备、本地控制器和高端双插座Xeon主板。站在它上面,一根坚硬的柱子支撑着躯干,支撑着两条手臂和一个富有表现力的头。每只手臂都有7个拟人化自由度(DOF),上臂有Schunck电机,前臂有定制的3自由度,手腕有6自由度扭矩-力传感器,三指BH8 Barret手有4自由度。头部通过一个4自由度的脖子与躯干相连,有两个可定向的Point Grey火线摄像头,一个华硕Xtion测距传感器和500万像素的Flea3摄像头。它还具有铰接式偏航和眉毛,用于合成面部表情,麦克风和扬声器用于语音交流。总自由度为37。所有这些元素的控制都是由开源机器人框架RoboComp创建的一组组件执行的,该组件可以轻松地与ROS或Orca2等其他框架进行通信。机器人目前可以执行基本的导航、操作和交互行为,这些行为是在新的RoboCog架构下组织的,并在RoboComp框架之上开发的。
-

托尔
- RoboLab已经完成了机器人Thor,这是其原始机器人RobEx的新版本。它已经完全重新设计,以承认150Kg的负载,提供高达150Ah/12v的电力。
雷神被设计成一个高性能移动机械手的基础,拥有7个机械臂、一只手和一个富有表现力的头。
雷神有一个运行Linux和RoboComp的嵌入式Cortex处理器。内部运行的基本组件计算里程数信息,并提供激光数据和电池状态。此外,还可以添加一些反射作为新组件。
-

甜酒
- Dulce,作为五年级学生教育研究经验的一部分,RoboLab制作了一个执行Logo程序的机器龟。这项工作是Dulce Chacón小学数学老师Petri Colmenero与RoboLab团队长期合作的一部分。
在本学期,五年级的学生每周都会使用KTurtle开放软件Linux应用程序学习Logo。在介绍了计算机编程的基础知识之后,今天的参与者直接给机器人Dulce编程,命令它在地板上的一块巨大的板上画字母和几何图形。
该活动旨在使计算机和机器人更接近学习过程,将其转变为一种主动的,“边做边学”的体验。
-

熊属
- Ursus是一款辅助机器人,由埃斯特雷马杜拉大学机器人与人工视觉实验室与virgin del Rocío医院合作开发。它旨在为患有脑瘫的儿童提供游戏,以促进他们的康复。它也将被用作他们的治疗师的工具。为了给孩子们带来视觉上的愉悦,它有一个友好的高度,并被包裹在一个泰迪熊的覆盖组织中。患者可以通过观察机器人投射在墙上的图像实时获得锻炼状态的反馈。这些信息鼓励孩子们纠正自己。
在ACROSS项目中,Robolab正在与塞维利亚的圣母医院Rocío合作开发一款新型机器人。它旨在为患有脑瘫的儿童提供游戏,以促进他们的康复。它也将被用作他们的治疗师的工具。为了给孩子们带来视觉上的愉悦,它有一个友好的高度,并被包裹在一个泰迪熊的覆盖组织中。患者将通过观察机器人在屏幕或电视显示器上投射的图像,实时获得锻炼状态的反馈。
在这个视频流中,机器人注入虚拟物体,指示运动的极限。这种增强现实功能旨在增加用户的沉浸感,并延长体育锻炼的持续时间。为了达到用户手臂的必要跟踪精度,URSUS使用脖子下的摄像头和增强现实技术。
-

Muecas
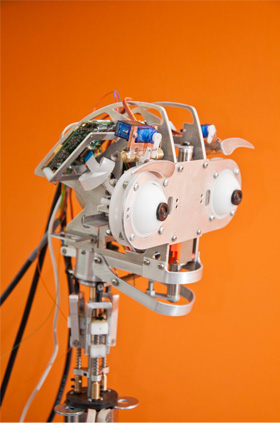
- Muecas是我们最后一个机器人脑袋。它被设计用于社交机器人,作为传递表情的手段。头部最复杂的部分是眼睛。它们由中空的尼龙球体制成,内部装有火线摄像机。
眼球由Faulhaber直线电机驱动,无齿轮减速,可以达到与人眼相当的速度和加速度。颈部为直流电机驱动的3自由度并联驱动器。
还有一个额外的dof的平移运动哦,头部。其他的元素正在发展:眼睑,眉毛和嘴巴将完成这个杰出的头部的基本禀赋。
所有电子设备都将安装在头部和颈部以下,包括运行RoboComp的双核Atom嵌入式处理器。所有进出头部的通信都将通过1Gb以太网接口。
-

Tornasol
- Tornasol是我们的第一个中型机器人。他有一个铝制框架和四个轮子(不是很好主意)携带所有的电子设备和计算机在船上。我们为他设计并制造了功率放大器和一个基于微控制器的板,使用risc 100MHz日立SH3进行电机的PID控制。在这些元素之上,AMD K7处理器负责图像采集和处理,以及导航控制。此外,它还通过Gbit以太网链路与世界相连。
在上部结构中,我们放置了一个具有三个自由度的机器人立体头和两个火线摄像机。该机器人能够以4Hz的帧率生成其环境的近似3D重建。在这里您可以看到这些结果的一些快照。
-
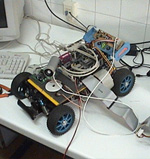
快速
- Speedy是一个基于1/8模型汽车的自主移动机器人。该机器人包括一个两级架构:一个带有C3 x86兼容处理器的mini-ITX板和4个基于ATMega32的定制板,这些板是在实验室设计和制造的。
每个电路板都负责一个或一组低级行为:其中一个是PID驱动电机控制,转向伺服控制和自动驾驶仪的数字罗盘,另一个是超声波倾斜控制扫描仪,第三个是一组用于倾斜传感的3轴加速度计,以及一个泛倾斜相机的伺服控制。由于转弯半径的限制,建议将所有硬件移植到新的机器人基座上。
我们已经开始使用Ice通信框架开发基于组件的软件。
-
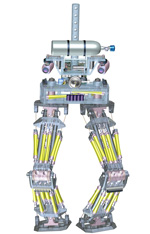
Pneux
- Pneux是由实验室前毕业生Sebastian K.设计的两足机器人的完整机械设计。它的执行器是气动肌肉,当我们获得资金时,我们会不时使用这项技术。它的脚踝上有2个,膝盖上有1个,臀部上有3个,还有一个立体视觉头部。
在与马德里politcima大学的fsamlix Monasterio教授的合作下,他们对动态行走机器人进行了更多的研究。
-

立体声头
- 作为塞巴斯蒂安论文的一部分,他设计了一个立体机器人头部,并将其安装在机器人上,以取代旧的头部。这个新磁头比旧的更快更准确。这些相机是索尼的火线型号,具有可控制的变焦、对焦和许多其他参数。
-
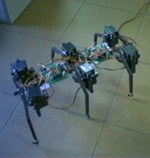
Insex
- Insex是一个六足机器人,由去年的本科生制造。它的部件是由尼龙-玻璃纤维化合物制成的。关节由12个伺服电机驱动,由3个级联商业板控制。它的小大脑是在体外的计算机中按照相当复杂的基于组件的分布式设计编写的c++代码。主要的限制是缺乏来自脚部的力反馈。
-
三浦
- Miura是立体声版的Pulguita。五自由度数字PID控制伺服和两个ISight火线摄像机。特别针对新的双核处理器。
提交给ICINCO-MARS 2007的论文,描述了我们目前正在开发的用于视觉注意力和导航的分布式架构。
-

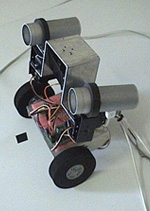
Pulguita
- Pulguita是我们桌上的一个快速算法演示器。它可以连接到任何计算机,并用于尝试和调试视觉和导航算法。相机是苹果公司的ISight,我们使用了双叶的两个数字伺服器。该基地也建立在两个伺服器之上,它们都由微控制器板控制,并通过串行链路连接到Pc机。它成本低,组装速度快,可用于机器人或视觉课程。
-

主从手术工具
- 主从手术工具对机器人微创手术器械。该项目的目标是设计一种具有力反馈的远程操作手术器械的机制。左图显示了支撑仪器的两个底盘。在右图中,一个定制的扭矩传感器用于在主端再现从端遇到的阻力。
这一项目是与西班牙Cáceres微创外科中心和马德里波利特拉西亚大学fsamlix Monasterio教授小组合作开发的。



















