- 提供配置文件
- 人工智能研究中心(CAIR)是计算与数学科学学院的重点研究中心之一
我们是一个由叶伟教授领导的研究小组。我们在机器人技术方面的工作旨在开发一系列albot,每一个都为人类和动物如何计算其空间环境的表示提供了一些重要的见解。在空间认知的文献中,后一个过程被称为认知映射及其产物——认知地图。
产品组合
机器人:机器人为人类和动物如何计算其空间环境的表示提供了一些重要的见解
- Albots是专门为研究认知映射和认知映射而创建的机器人。这些机器人被视为一个独立的物种,它们的认知映射正在被研究中。通过观察不同的生物因子如何映射它们的环境,我们了解了很多关于认知映射的知识。有人认为,如果机器人能解决生物制剂研究人员遇到的类似问题,就可以用机器人做同样的事情。
因此,albot并不是用来模拟认知映射概念的机器人。为了区分两者,考虑一下地标在认知地图中的重要用途。在模拟方法中,机器人被编程使用某些可感知的特征作为地标,主要是演示如何在映射过程中使用这些信息。在Albot的方法中,需要研究问题本身,即如何识别地标和为什么识别地标。为了使算法具有认知相关性,它必须表现出人类和动物使用地标的一些关键特征。其中一个特征是地标稀疏且相距遥远,即不是每个视图中的所有独特特征都被视为地标。那么Albot是如何在它的映射过程中识别和使用地标的呢?它告诉我们关于认知映射的什么呢?
Albots0和Albots1
- 到目前为止,我们已经创建了两个albot, Albot0和Albot1。Albot0是该系列的第一个,旨在研究生物如何利用不精确的地图找到回家的路。使用了带有声纳传感器的机器人。声纳读数是有噪声的,如果没有误差校正,创建的地图是高度扭曲和不准确的。这给我们带来了一个挑战:有了这样一张地图,Albot0如何找到回家的路?具有不同感官能力的生物制剂经常面临这一挑战。我们为Albot0创建了一种算法,利用它不精确的空间地图中提供的距离和方向信息来找到回家的路。这两种信息通常用于生物制剂。从实现Albot0中得到的一个重要教训是,认知地图中的空间性为我们提供了丰富而有用的信息。这反驳了最近的观点,即认知地图的概念不是有用的。 For details of this work, see: W.K. Yeap (2011) How Albot0 finds its way home: A novel approach to cognitive mapping using robots. To appear in Topics in Cognitive Science
Albot1的设计目的是研究如何将连续的视图整合成一个感知图。使用激光测距机器人。请注意,机器人和认知科学研究人员采用的标准解决方案是将当前视图中物体的坐标转换到下一个视图。这种方法很有吸引力,因为有一个简单的数学过程可以做到这一点,新的概率算法已经被开发出来,扩展了基本方法来处理由于传感器引起的误差。然而,人们被发现不会在扫视层面整合连续的视图,这种现象被称为变化盲视。他们的认知地图是碎片化和不精确的但如果他们的感知地图是精确和详细的,为什么会这样呢?Albot1的创建是为了研究如何在不整合连续视图的情况下创建一个不太详细的感知地图,但仍然足够精确,可以帮助我们定位到看不见的位置。图1显示了Albot1创建的碎片感知地图。关于这项工作的细节,请参见:W.K. Yeap(2011)人类感知映射的计算理论。
接受认知科学会议。叶伟凯,Md. Z.侯赛因,T.布伦纳(2011)
关于感知映射理论的实现。提交给aaai - 2011。
我们目前正在扩展我们的工作,以展示如何使用视觉计算感知地图,以及如何识别和使用地标。我们还在研究使用Albots来测试婴儿在他们的世界中发现概念的能力,例如原意理论。
我们渴望将我们的新算法用于机器人的实际应用。其中一个应用是开发能够在葡萄园、葱场和芦笋场等农场中自主工作的机器人(见图2)。机器人有初心吗?
-
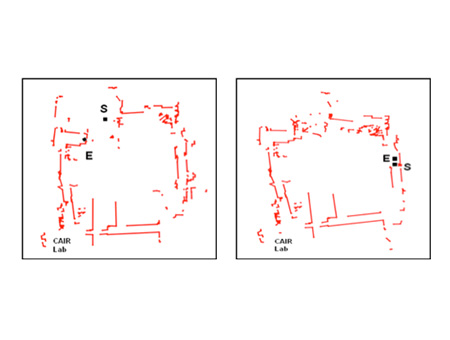
图1:使用我们的新算法生成的感知图
- (来自图2 XX)
-

图2:阿尔bot可以在葡萄园里闲逛和工作吗




