- 提供配置文件
- 我们的主要活动是研究,这也推动了其他的研究。我们获取知识,并为开放问题找到解决方案。我们认为,我们的活动应该以我们社会的需要为指导。因此,我们研究问题的解决方案,以改善我们生活和环境的各个方面。
我们与其他研究小组有联系,我们从事国际项目。我们期待着为未来的共同项目建立新的联系。
产品组合
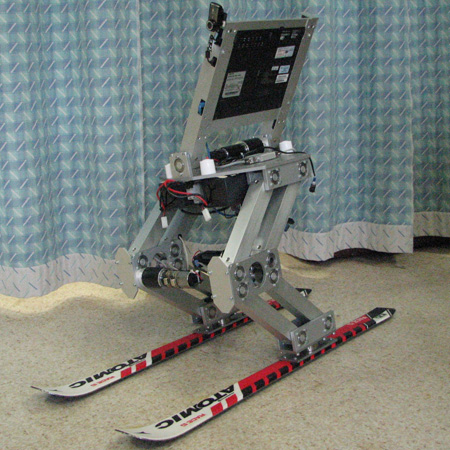
滑雪的机器人
- 我们利用雕刻技术设计了一个专门用于滑雪的3自由度机器人。该机器人有一个复杂的感觉和控制系统,可以确保在滑雪时在滑雪坡上保持稳定,并跟踪标有比赛门的路径,避免障碍
该机器人采用分层结构的多处理器计算机系统进行控制。上层控制器用于导航、视觉处理和决策。上层控制器与GPS接收器和USB摄像头进行通信。低层控制器负责滑雪者的稳定性、关节控制,并从由电子陀螺仪、安装在滑雪板和机器人腿之间的力传感器以及电机位置传感器组成的传感系统接收信息。两台计算机通过以太网使用UDP协议进行通信。采用Matlab xpcTarget工具箱实现分层控制律,控制采样频率为1kHz。视觉处理是用一个视角为78度的单一相机完成的。对于320 x 200像素的图像,我们能够以30帧/秒的速度获得目标识别和定位。当前机器人位置和下一个门之间的距离使用相机方向和估计的门标记的大小计算。我们分别用蓝色和红色的栅栏。 The color defined whether the robot-skier should approach them from the left or from the right side depending on the color. The desired turn radii were estimated from the localization information, and the angular acceleration. The velocity in the sagittal plane was obtained by the GPS sensor with an accuracy of 0.1 m/s and sample time of 0.25 s.
我们在滑雪场上进行了几次试验。我们的实验表明,机器人能够遵循由四个比赛门的任何组合标记的期望路径,只要门之间的距离允许机器人执行转弯。
-
滑雪的机器人
-

滑雪机器人登台表演



