Videos
Loading the player ...
- Offer Profile
- At the Cornell Computational Synthesis Lab we explore biologically-inspired computational and physical processes that allow complex high-level systems to arise from low-level building blocks - automatically. We seek new biological concepts for engineering and new engineering insights into biology.
计算合成实验室包括来自工程,计算机科学,物理,数学和生物学的各种学科的研究人员。我们正在研究自组织和进化现象,以及它们在工程设计自动化和对自然系统复杂性出现的理解中的应用。我们正在各个领域开发摘要模型和应用程序,并建立工作系统来测试新想法。仍然有许多开放问题,但是如果可以理解和利用这些过程,这将是工程学的未来。
Product Portfolio
Projects of Victor Zykov Postdoctoral Associate at Computational Synthesis Laboratory
-

Open Source Modular Robots
-
- 模块化机器人的吸引力的ir potential versatility, robustness, and low cost of manufacture, however, these advantages have yet to be realized. Due to demanding level of expertise and a prohibitively high cost of fabrication and operation, majority of research in modular robotics is limited to few specialized labs at select universities.
We suggest that by making modular robots available to greater numbers of researchers, enthusiasts, and hobbyists we remove barriers to entry and accelerate progress of the field. We created a wiki-based web portal to offer all interested researchers and enthusiasts an open source, expandable modular robotic system.
-

Robot Self-Modeling for Functional Damage Compensation
-
- Animals sustain the ability to operate after injury by creating qualitatively different compensatory behaviors. Although such robustness would be desirable in engineered systems, most machines fail in the face of unexpected damage. We describe a robot that can recover from such change autonomously, through continuous self-modeling. A four-legged machine uses actuation-sensation relationships to indirectly infer its own structure, and it then uses this self-model to generate forward locomotion. When a leg part is removed, it adapts the self-models, leading to the generation of alternative gaits. This concept may help develop more robust machines and shed light on self-modeling in animals.
-
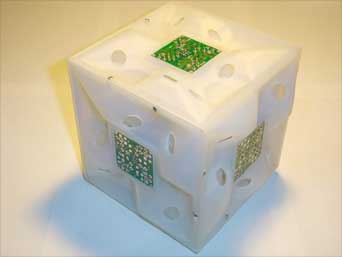
Machine Self-Reproduction: Complete Robot Reconstruction
-
- Afraid of machines taking over? Sorry.
Here we show several machines built from our MolecubesTM that can build their copies that can build their copies etc. Robots here are only programmed to reproduce. Sure, they can be coded to do other things.
-
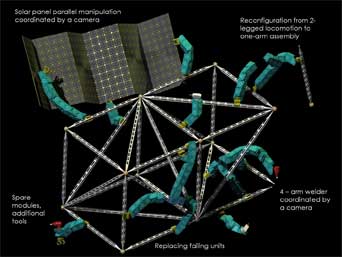
Stochastic Reconfiguration in 3D: Solid Part Repair
-
- This project was started by Paul White in 2002. I joined the project in 2004 and helped Paul to redesign re-design the second system prototype (shown) and carry out final experimentation.
The project goal is to build 0.2 .. 0.5 mm zero degree of freedom robots that, while moving stochastically, will be able to adhere to one another in a programmable, reconfigurable way. We plan to use this process for reconfigurable high resolution arbitrary 3D shape formation.
My part of the project consists in building and experimenting with a large-scale prototype. Mike Tolley is currently working on microscale system implementation.
-
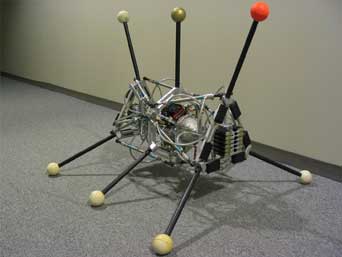
Autonomous Controller Design through Physical Experience
-
- In this project, together with Hod Lipson and Josh Bongard, we evolve locomotion controllers on a real physical robot - the Nonaped. It is a pneumatic parallel actuated robot with 12 internal non-articulated degrees of freedom.
Our initial goal was to evolve a dynamic gait on a physical robot, as of now accomplished: two hardware evolutionary runs were conducted; as a result, several dynamic locomotion patterns evolved. All these gaits use open-loop controllers.
-

PhoneBot: Damage Resilient Modular System
-
- This project will combine the achievements of the four above projects in a single system. Here we propose to join cell phones with our MolecubesTM -based robotic lego set to build versatile damage resilient robots.
In 20 years from now, cell phones will be ubiquitous and virtually free. They will comprise voice communication and messaging capabilities with office applications, scheduling, photography, personal media entertainment, wireless Internet access, etc. On the other hand, such combination of low cost and high computational capabilities will make cell phones the only affordable computing device for many people in underdeveloped economies.







