- 提供个人资料
- 移动机器人实验室开发和原型实验性移动机器人系统,包括创新的移动机器人,避免障碍系统,定位系统和残疾人的机器人辅助工具。
产品介绍
创新的移动机器人
-

MDOF机器人
-
-
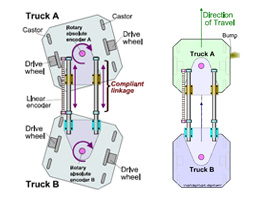
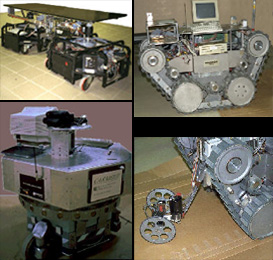
- UM's Multi-Degree-of- Freedom (MDOF) vehicle is fully omni-directional (can travel in all directions and rotate at the same time).
- 独特的,专利的符合链接会吸收瞬时控制器错误,以避免轮滑。
- 从执行器失败中恢复:
- 即使在电动机,功率放大器或其他关键组件失败之后,车辆也可以远程移动和控制。
-
拍手
-
-
- UM developed a new method for odometry error correction that was implemented on UM's MDOF vehicle, now named "Compliant Linkage Autonomous Platform with Position Error Correction" (CLAPPER).
- 拍手uses its redundant encoders to constantly measure the relative position and orientation of its two "trucks."
- 每辆卡车都可以检测并纠正另一辆卡车中的进程误差。
-

全能
-
-
- 1995年,Oak Ridge国家实验室(ORNL) - 需要一个高度准确的移动机器人来为其“移动映射器”项目。
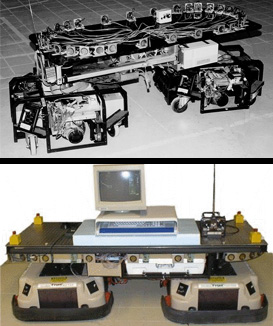
- Ornl发现,在UM的拍手接近时,没有市售机器人满足要求。
- HelpMate Robotics Inc. and UM built the first commercial CLAPPER, called OmniMate.
-

OmniTread
-
- The OmniTread serpentine robot is designed to traverse extremely difficult terrain, such as the rubble of a collapsed building.
Omnitread也可以驾驶沙子和岩石。它可以穿过小孔并爬过高大的障碍。
创新:
- Use of pneumatic bellows for joint actuation. Bellows are powerful, naturally compliant, and take up minimal space.
- 最大程度地覆盖所有各个段的各个方面,并具有额外的移动轨道。
- 独特的气动控制方法允许同时对刚度和关节角度的比例控制。
- “驱动轴脊柱”由中心部门的单个电动机提供动力。脊柱穿过所有段的中心,并为所有轨道提供扭矩。
-
Segway RMP
-
-
- 我们从DARPA MARS计划收到了Segway机器人移动平台(RMP)
- 我们为Segway RMP配备了精确的FlexNAV本体感受*位置估计(PPE)系统。
*) "Proprioceptive" means "without external references"
- We equipped the Segway with obstacle avoidance capabilities.
避免障碍
-

CARMEL
-
- 卡梅尔是UM最古老的移动机器人。自1987年以来。
用于开发VFH避免障碍法的测试床。
- VFH is widely used.
- VFH弥补了超声传感器的不准确性。
- 我们相信VFH avoidanc最快的障碍e method demonstrated to date.
-
eeruf
-
-
- 多个声纳的问题:一个传感器从其他传感器中拾取回声;记录错误阅读。
- •大多数系统要等待很长时间,然后发射下一步声音验缓慢的旅行速度。
- •UM开发的误差消除了快速超声射击(EERUF)。
- •使用EERUF声音可以快速发射,以4英尺/秒的行程速度产生避免障碍物的数据。
-
Omninav
-
-
- Omninav是一种新方法,可为非点,全向移动机器人提供障碍。
- •问题比避免点状机器人更困难。
- • UM is currently investigating the feasibility of a method based on multiple VFH "act-on" points.
-
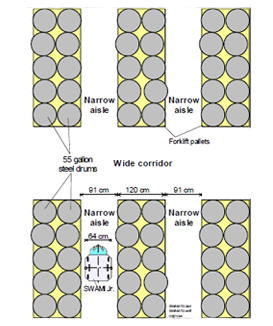
aislenav
-
-
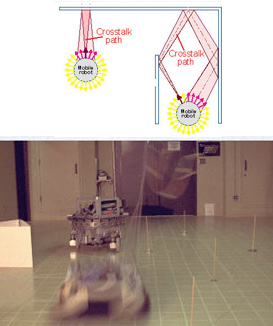
- • UM developed a new approach to navigating a mobile robot through narrow aisles.
- •关键要求:进入过道内的进入,退出和旅行100%无碰撞
- •由于镜面反射和串扰导致错误的范围读数,因此很难与声纳相遇。
- •UM的解决方案基于:
- •传感器的优化位置
- • only accurate radial range used readings for servoing.
- •不准确的范围读数仅用于“是/否”决策。
-
统治移动机器人
-
- 1998年,我们将VFH/EERUF障碍技术移植到所谓的战术移动机器人(TMR)。
- 在这个由DARPA资助的项目中,我们为在敌对环境中运行的移动机器人开发了高度可靠的避免障碍方法。
-
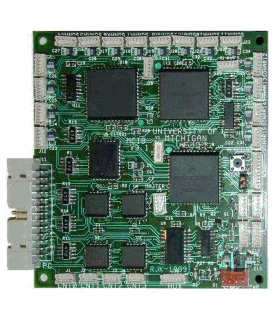
Micro-controller Interface Board
-
-
- 在TMR项目的过程中,很明显,EERUF方法的小英尺打印硬件实现将对小型移动机器人有很大好处。
- • Consequently we implemented EERUF and other functions on a board the size of a floppy disk.
- 由于其他移动机器人研究人员的浓厚兴趣,我们已将MCIB商业提供。
-
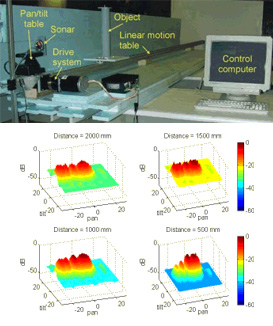
避免障碍测试
-
-
- 包括计算机控制的电动机驱动的4米线性运动台和固定式锅/倾斜桌。
- 可以将物体(=障碍物)朝向避开障碍物传感器(例如声纳)朝向锅/倾斜桌(反之亦然)。
- 在完全控制的动态条件下,可以准确地重现动态障碍检测条件。
- 独特的测试床,在美国可能只有其中之一
移动机器人定位
-
UMBmark
-
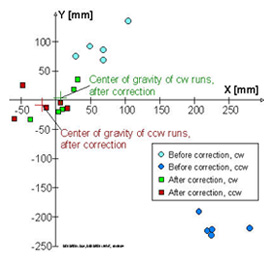
- UM开发了用于移动机器人的渗透计量准确性的基准测试,称为“ Umbmark”。
- UM测试了带有UMBMark的六种不同的车辆配置:
- TRC Labmate,差分驱动器。
- CyberMotion K2A Synchro Drive。
- 拍手MDOF车辆。
- Remotec Andros, tracked vehicle.
- 安德罗斯(Andros)带有编码器拖车。
- Smart Encoder Trailer (simulation).
-
Calibration
-
- UM开发了用于校准移动机器人的新方法
- Method based on UMBmark.
- 适用于差速器驱动车辆(例如Labmate)。
- 将系统错误降低一个数量级。
- 方法可以完全自动应用。
- 其他研究人员测试和确认的方法。
-
陀螺仪
-
-
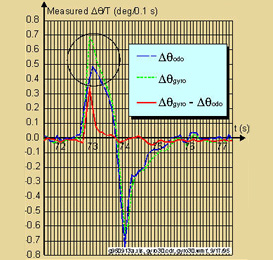
- 其他问题:地面上的颠簸或裂缝可能会导致探测器中的较大错误。
- UM is developing new methods to reduce such "non-systematic" errors.
- 最近的开发:“陀螺仪”。使用来自陀螺仪的数据检测和纠正非系统错误。
-
导航书
-
-
- 1994年,ORNL要求有关移动机器人定位方法的报告。
- 作为回应,UM对文献进行了调查,与公司进行了交谈,并进行了对“我在哪里”报告的最全面的调查。
- 由于其一般重要性,UM报告是:
- published in book form,
- 发表在CD-ROM上,
- 并在互联网上完整发布。
-
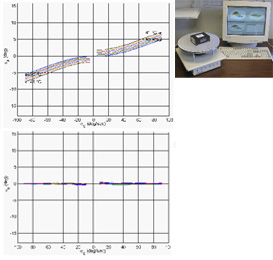
陀螺仪校准
-
- UM开发了准确校准的方法
光纤陀螺仪。
图片说明:
- TOP:
陀螺仪校准:制造商的原始校准典型的陀螺仪输出错误
- BOTTOM:
应用UM的新校准方法后,错误将减少多个数量级。
-
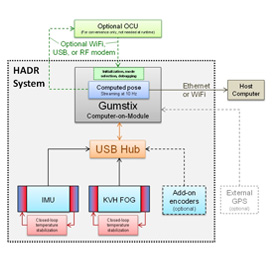
高准确的死刑系统
-
- HADRS的关键特征
- Works on any wheeled or tracked ground vehicle.
- 在任何地形上工作,包括坚固,陡峭的地形。
- 仅需要电源连接和车轮/轨道编码器数据。可选地,系统可以使用我们可改装的附加编码器中的编码器数据,从而使其独立于主机车辆编码器。
- Works without GPS, computer vision, beacons, or any other external references but can accommodated and integrate optional external GPS.
- 对环境无动于衷:室内,室外,城市或农村。
- 是小型的,适合1/3 Packbot有效载荷湾(Rev.2,正在开发的较小:6.23x2.87x3.25英寸)。
- Is designed for minimal power consumption.
- 输出JAUS兼容,时标的X,Y,Z,并以10 Hz为标题数据流。
- 通过以太网,WiFi,RF或远程RF数据调制解调器输出数据。
- Is unaffected by extreme operating temperatures or sudden changes in operating temperatures.
-
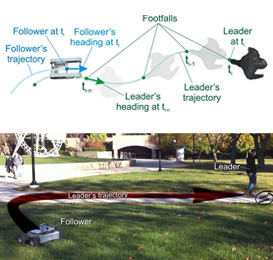
领导者追随者导航
-
-
- 目的:
- Enable a mobile robot to follow a walking human leader没有GP,没有视线。
- 工作原理:
- 领导者穿着我们的个人死亡(PDR)系统。
- 追随者具有死刑功能(通常:IMU和ODOMETIRE)。
- 这两个死刑系统通过RF调制解调器进行通信。
- 我们的领导者追随者方法同步了两个死刑系统。
- Expected Performance:
- Follower tracks leader for unlimited duration in any environment.
- 追随者可能以2-60秒的速度落后领导者。无需视线。
-

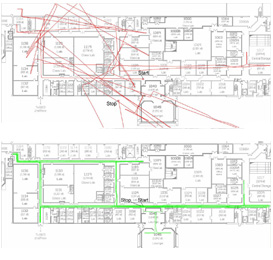
精密室内跟踪远程操作的UGVS
-
-
- 目的:
- 通过为UGV在建筑物内部驱动时,通过为Tele-tele-tele-tele-tele-tele-tele-tele-tele-tele-tele-tele-tele-tele-tele-tele-tele-tele-tele-tefiperation提供电视操作。
- 工作原理:
- Uses low-cost gyro together with UGV�s built-in odometry.
- 使用我们的申请专利的启发式漂移消除(HDE)方法来消除包括陀螺仪漂移在内的所有陀螺误差的影响。
- 不需要GPS,RF信标或基准。
- 表现:
- 无限持续时间运行中的零标题错误!
- 平均位置错误<距离旅行的1%!*
-
NASA Mars Rover 2009
-
-
- NASA资助的项目旨在为Mars Rover 2009 Mission开发高准确的死刑系统。
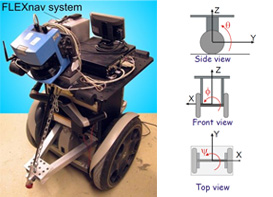
- 我们建造了NASA FIDO级火星流浪者的功能齐全的1/2级克隆“蓬松”。
- We implemented our Fuzzy Logic Expert Rule-based navigation (FLEXnav) method on Fluffy.
- 我们优化了flexNAV系统,用于在沙质土壤上的独特车轮滑移条件。
- 主要创新:
通过滑移监控的轮滑探检测和校正
-
启发式漂移减少
-
-
- Many vehicle tracking systems use GPS as the primary sensor and a gyro plus odometry as a secondary sensor. The latter helps compute the vehicle�s position during GPS outages.
- 这种方法的问题在于,低成本陀螺仪的漂移速率很高,这会导致几秒钟或几分钟后的标题错误。
- 启发式漂移减少(HDR) estimates the momentary bias drift of the gyro based on tested and proven heuristics, and then subtracts that estimated drift from the gyro's output.
- 结果是有效漂移的急剧减少,导致较低的标题误差较低!
- HDR根本不需要硬件。这是一个小型软件段,可以添加到任何现有的程序代码中。
- HDR与任何陀螺仪或IMU一起工作;低成本/高饮用陀螺仪最有效。
Pedestrian Tracking
-

室内行人跟踪
-
- 操作原则:脚式IMU
特征
- 记录并传输步行或爬行人的位置。
- Eliminates effect of accelerometer drift with every step.
- Uses patent-pending Heuristic Drift Elimination (HDE) algorithm to eliminate effects of MEMS gyrossensitivity to linear acceleration and drift.
- Works with walking/jogging/crawling/skipping forward/backward/sideways/any direction.
表现
- 无限持续时间步行中的平均标题错误接近零!
- 平均位置错误<步行中旅行的距离的1%> 30分钟
- 平均海拔(z轴)误差:<1 m。
-

户外行人田径
-
- 操作原则:脚式IMU
特征
- 记录和传输步行者的位置。
- 不需要GPS。
- 不需要信标或任何其他外部参考。
- Eliminates effect of accelerometer drift with every step.
- 不需要特定于用户的校准*。
- 记录和(无线)实时流出数据。
表现
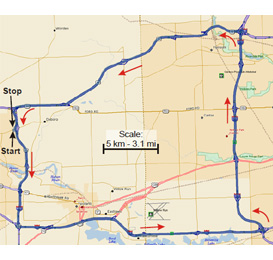
- Average position error during the 2-mile ascent: ~0.5% of distance traveled.
- 在2英里上升期间最大的位置误差:<40米。
-
室内Segway跟踪
-
- 在结构化环境中,启发式增强的进程(HEO)消除了在室内使用时的探测标题误差。
特征:
- 除了轮式编码器以外,不需要任何传感器进行探测。
- 不需要信标或任何其他外部参考。
- 实时工作,仅需要20-30行C代码。
- Provides near-zero heading errors in drives of unlimited duration and distance*.
- Provides position error <1% of distance traveled*.
残疾人的机器人技术
-

Navchair
-
-
- UM developed "NavChair" for severely disabled users.
- Some users cannot control their wheelchair accurately with a joystick, because of tremor or other limitations.
- 避免纳维尔的障碍克服了这些问题:
- 用户用操纵杆提供了一般旅行的方向;Navchair遵循此方向。
- 当遇到障碍物时,Navchair在尝试尽可能紧密地维护用户指定方向的同时将其引导。
-
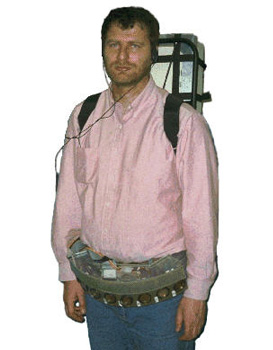
Navbelt
-
-
- 与Navchair方法类似,UM为盲人开发了“ Navbelt”。
- 使用UM的避免障碍:
- • instead of issuing steering signals to the robot controller, NavBelt generates acoustic cues conveyed to the user via headphones.
- Navbelt的局限性:
- Required hundreds of hours of training before users could respond to the acoustic cues in time, even at slow walking speeds.
-
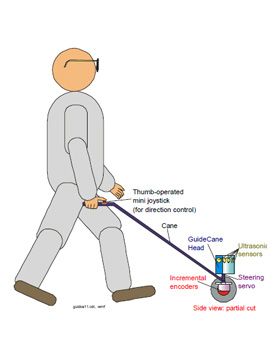
指南
-
-
- 有望解决盲人指导的方法:UM的“指南”,具有超声传感器的避免障碍物
- Steers around obstacles
- 用户立即感受到了转向动作,然后遵循转导传感器头规定的更改路径。
- 指南的主要优势:
- Fully automatic obstacle avoidance
- Completely intuitive operation, requires no training at all.
- Maintains position information by combining odometry, compass, and gyroscope data.





























