- 提供配置文件
- 高级驱动辅助系统研究组是计算机视觉中心的一部分,总部设在西班牙巴塞罗那大学
本组注重整合计算机视觉技术,如模式识别、特征提取、学习、跟踪、3D视觉等开发实时算法 帮助驱动活动
产品组合
项目

- 智能车辆指汽车、卡车、总线等传感器控制系统集成以协助驱动任务,因此名称为高级驱动辅助系统
目的是结合传感器算法理解车辆环境,使驱动程序能够得到帮助或被警告潜在危险视觉是驱动使用的最重要感知力,因此摄像头是这些系统最常用传感器
在此背景中,我们集团侧重于组合计算机视觉技术,如模式识别、特征提取、学习、跟踪、3D视觉等开发实时算法 帮助驱动活动帮助应用实例有:巷离港警告、碰撞警告、自动巡航控制、行人保护、头灯控制等
组织创建于2002年,由Antonio M博士牵头洛佩斯由9名医生和13名博士生组成。目前该小组得到西班牙教育和科学部研究项目TRA2011-29454-C03-00的支持
-

-
轮廓制作
-
- 以摄像传感器为基础检测车道标识可低费解决车道启程问题和速度曲线警告问题文献中报告了若干方法与实现可靠检测问题仍然存在,原因包括投影影、疲倦和隐蔽标识、环境照明条件多变等
集中提高检测可靠性并同时计算相关道路几何参数,如曲率、车道机能和车道位置视频序列逐条处理框架,即没有时间一致性或连续性方法至少能运行40ms
-
-
行人
-
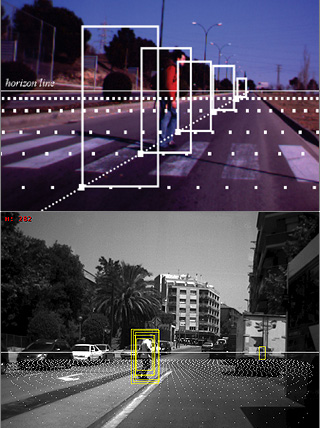
- 行人事故是欧洲联盟交通伤亡的第二大源从这个意义上讲,高级驱动辅助系统(ADAS),特别是行人保护系统(PPS),已成为提高交通安全的一个重要研究领域。为了避免与行人相冲突,必须检测行人,即相机传感器密钥,因为它们提供大量的提示和高清晰度
目前有两大线工作,一线基于可见频谱图像,另一线主要受夜间驱动,以热红外线为基础。CCD或CMOS传感器更容易获取可见频谱、廉价价位、信号对噪比和分辨率提高,并因多事故白天发生此时此刻,我们用可见频谱图像工作
在此背景中,行人检测任务的困难产生自户外平台操作,所有ADAS应用中反复挑战,以及处理行人等方位变换类问题。难点归纳如下:
- 目标内部变异性极高(如服装、光照、距离、大小等);
- 后台分片变换
- 目标摄像头通常跟踪各种未知运动
- 快速系统响应和强应
-

-
视频匹配
-
- 视频同步两个序列可表示时间维度对齐,即查找第一个视频到第二个视频时段间段间段c(t1)=t2,这样第一个视频时段框架t1最匹配第二个视频时段对应框架c(t1)
最终目标比较视频: 查一对视频上有什么不同 通过移动插图拍摄 并跟踪或多或少相似轨迹之所以可能实现,是因为一旦两段视频同步并在某些假设下对应框架对可作空间注册因此,两段视频可比较像素
并比较车头灯系统
-

-
头灯类比
-
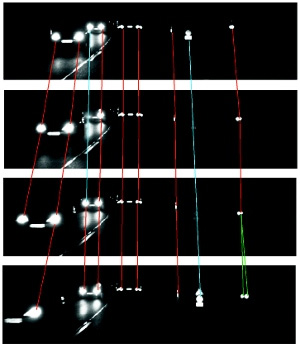
- 头灯是车辆重要的主动安全分量正因如此,汽车组件制造厂家不断改进这些组件。问题是如何评估头灯系统评价中的一个重要步骤是夜间沿测试轨迹驾驶的实际经验,同时观察其行为特征,如低波束横向和纵向伸展和光投向路面同质性
动态头灯评估通常相对化,即对两个头灯性能比较记录驱动器所见视频并配有摄像头接通挡风屏大有助于这一比较问题现在变成如何比较一对序列有两个问题必须解决:时间对齐或同步两个序列,然后空间对齐或注册所有对应框架我们建议半自动快速程序前一程序, 和自动方法后后继
并提议简单聚变技术 以更好地视觉化头灯差异
-
-
智能头灯
-
- 智能车辆照明系统面向自动调节头灯光角,以尽可能照亮前面的道路,同时避免其他驱动器炫目系统的一个关键组件是计算机视觉软件,可辨别车辆头部和后光线与路灯反射元件如极电路标
设计出一组专业监督分类程序 依据与强度和形状有关的浮点特征 做出决策基础训练集超过60 000blobs(!)我们的确辨别相当好的前灯、尾灯、电极和交通歌声
尽管总体表现良好,但仍有挑战案例尚未解决,妨碍采用这种系统显微小浮云对应远方车辆 时不时拆卸重现误差原因之一是它独立于其他框架执行因此,我们通过跟踪浮点数解决问题,以便(1) 沿轨获取更多特征测量量;(2) 计算运动特征,我们认为这些特征与分类相关;(3) 执行时间一致性跟踪方法处理布局隔离问题 并分拆合并








