

iRP参与数个研发项目并进行国际研究
组织与工业伙伴
MIRPA的使用并不限于机器人领域iRPA每次期望模块化、可扩缩和弹性实时系统时都带来其巨大的长处
决策树之道
决策树被用作方法基础,实现带任意输入值的N维空间联机轨迹生成和同步所有度fridom如Fig显示二叉图解三阶联机轨迹生成的简单实例写到Fig1函数将8N维空间映射到3N维空间时必须说明(Cartesian空间N=6)。定义此函数是该检索工作的主要部分定义过后,它将导致经典轨迹与矩形混混相演进,如Fig显示3表示三阶轨迹中最微小案例


系统概述
微博2描述系统开发第一步组使用符号空间关系定义3级用户只需点击合适的表面来做此操作 。系统可自动检测用户可能产生的矛盾和错误
规范集成组后,组成序列应用集分策略生成
确定集序后,必须应用免碰撞路径规划程序
此外,组装操作必须转换为适当的技术原生网技术原生网由技术原语组成图中节点表示技能原语和边端附加入场条件注解每一种技能原语表示传感器机器人运动
有了这个概念,许多不同传感器可同时使用目前我们使用摄像头和强力传感器
虚拟环境规划过程,因此现实世界和虚拟世界间可能发生位移技术原生网成功处理这些移位提供系统规划、评价和执行汇编任务
弹性自动化材料流,例如不同的工作单元和计算机控仓库在现代工厂环境变得越来越重要获取这种灵活性显然使用自主制导器许多自主引导飞行器概念从文献中知道,使用高度专用机载传感器系统环游与这些概念形成对比的是,我们提议的灵活运输系统MONAMOVE仅使用简单低价载波传感器并用全球监测系统和全局导航系统全局监控和全局导航组合使载体能够在没有任何固定预定义路径下导航
即使在简单环境里,选择最优机器人路径取决于多种因素(例如:阻塞密度、运动方向、速度)数学模型因此成为统计运动规划的重要基础描述阻力运动,开发出两种模型 -- -- 精度和复杂性不同 -- -- :随机轨迹允许精确评价机器人相碰撞概率和预期驱动时间(它考虑到实现目标的时间还取决于非确定性逃避操作的成本)。随机网格比较简单表示法,用于规划最小碰撞概率的机器人轨迹
统计方法生成路径经过评价并比较用传统规划器获取的结果,从而最小化路径长度自然,统计规划路径较长,因为它们有意嵌入绕行但在动态环境中,绕行可大大降低碰撞概率和预期驱动时间,而传统轨迹则比
项目描述
Klinik und Poliklikfur Hals-Ohrenheilkunde/Chirurgie项目目标智能引导内镜满足下列需求
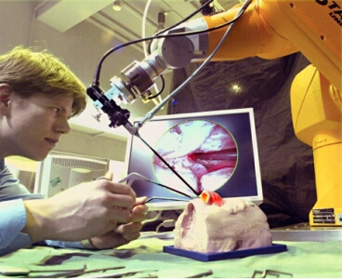
项目目标
本研究项目的首要目标是开发和评价计算机和机器人辅助方法,以支持挑战性外科程序图像分析、强控机器人控制与预操作规划模拟结合后,可实现的减法理解度应提高
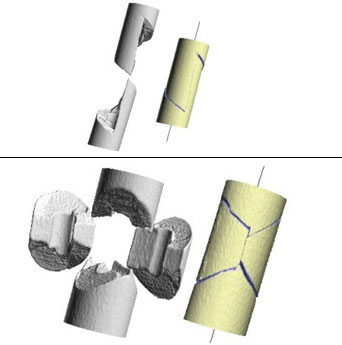
脉冲物体半自动化分片缩放-摘要
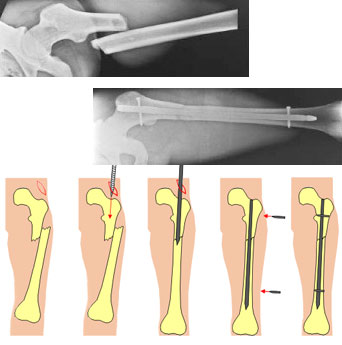
下表显示计算三维空间内断裂圆柱对象相对目标变换法的结果
先计算方轴位置和方向特制Hough变换实现轴是骨折切取最重要的属性,并可用作初始质估计法(总自由度6度问题约束4分解法)。
预处理步骤后,可使用已知表面注册算法计算相应断裂段之间的相对变换使用2D深度图相交法和ICP算法变量项目目标使用这些方法计算骨片目标配置,以便计算机辅助半自动化通过机器人减少骨折
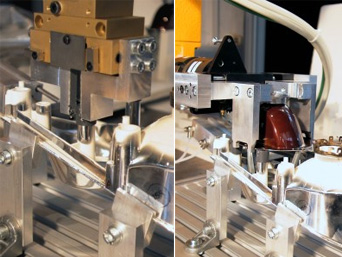
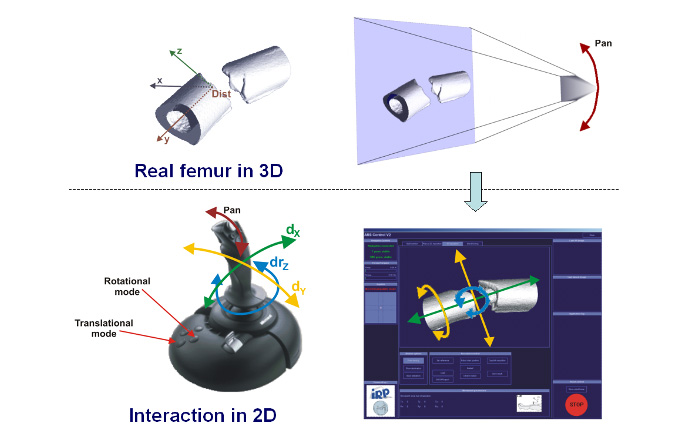
分片解析使用Telemanible带Haptical回馈-摘要
开发出复杂系统 允许使用机器人远程操纵器 支持骨折减序机器人标准工业SäubliRX90机器人机器人受外科医生控制 手柄手势反馈术内三维成像压缩期间向外科医生提供基础信息3D卷成像由PC自动分割产生高度精细的断裂段表层模型外科医生可用它精确移动碎片到理想目标配置光学导航系统确保PC显示器上显示的三维场景始终与真切外科环境一致虚拟3D模型总是以与实骨片相同的方式移动,实骨片由机器人移动
操作场内所有力和托盘都可用机器人手架强制/托盘传感器测量这些力量反馈回摇杆外科医生通过分心肌肉或骨折段间接触来感知力量对病人的动作
结果
第一次测试序列中,远程操纵器系统使用折损人体骨骼(无周围软组织)在我们解剖实验室评价可显示简单骨折可实现平均值约2摄氏度和2毫米下降即使是复杂骨折 可实现精度保持在4摄氏度以下从临床观点看,这些值不可接受
远程机系统还测试人尸完整的标本 完整软组织 折断骨所得结果与上文概述的结果相似。此外,我们可以证明远程管理裁剪比人工裁剪高得多,人工裁剪由经验丰富的外科医生在同一骨折上完成。
结论
显示式可视化形式和远程操纵系统交互作用以减股骨骨骨折结果证明高效直觉性所有测试人员经短时间学习后都能够实现可靠减法并高减法这些结果清楚地表明机器人化骨折下降的潜力,这将保证今后这类操作的高质量结果
使用鱼眼摄像头的长处是将全室映射到仅一张图像上单插孔或泛端声波摄像头只能映射房间的一部分
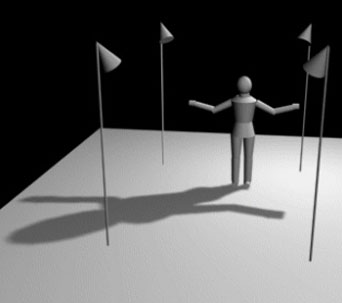
夜间检测瀑布红外线灯安装在会议室的不同位置上,优先使用天花板阴暗信息用于辨别立体人和假人从下图中可以看出,常态人的阴影比说谎者大得多。
直至现在,我们只考虑下降检测,但当然下降预防是另一项挑战性任务动作变换可能由疾病引起并可能导致下降视觉下降预防可检测这些变化,例如全科医生通知
这项工作得到了德意志电路库的支持,敬请


方法论
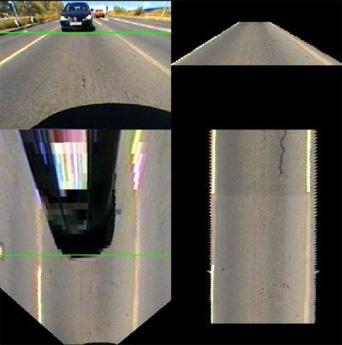
在许多车辆检测方法中,我们使用自上而下视图,通过反透视像像素投射街上,从下方图像和对应视频中可见在这个视图中,我们正在从右角向下看街道平面因此,不需考虑透视映射计算街道平面两个任意点的距离,它简化处理多项算法
一种方法使用自上而下视图生成街道纹理描述街面预期外观下图中显示右列生成街道纹理和左列源图像上行显示从相机看到的视图,下行显示相应的自上而下视图源图像和街道参考纹理比较,以检测下图显示的接近车辆和带绿线视频显示的车辆
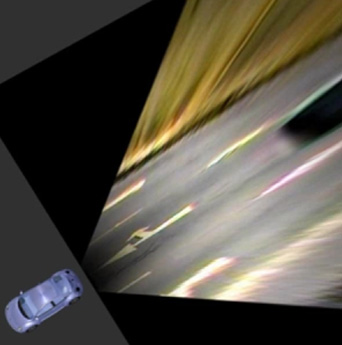
因为我们每端只有一台摄像头,我们不能使用立体视觉收集3D信息但由于汽车运动,我们可以使用运动结构3D世界三角点并计算精确位置结果是三维散射图传递区域
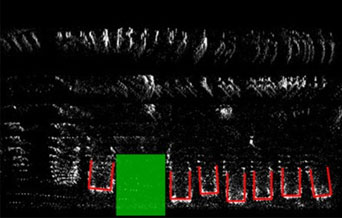
结果
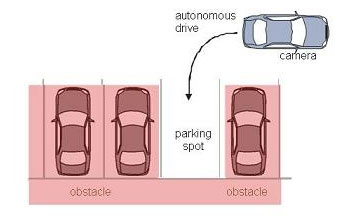
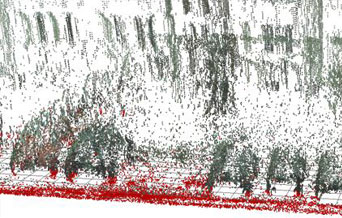
散射图实例可见下方(图像3D散射图)。图中的每一点表示实3D点街上点为彩红色,屏障显示黑显示上向下视图显示全场从上向下显示模式变可见,可清晰识别汽车建模像字母U上下视图中可发现部分这些位置,汽车位置清晰识别免费泊车点现在通过寻找这些车间自由空间检测进程图解见下图公有汽车红色高亮显示自由空间标绿色(图像:自上而下视图场景)发现停机坪后可启动自动停机坪进程
实验飞行器:Paul
当前实验车Paul(德文:Parkt alleinunkt)使用视觉停车场检测Paul在汉诺威博览会2008展示Volkswagen公园辅助视觉系统


协作研究中心562的目标是进化方法学和组件相关基础知识,开发机器人系统以闭合运动链为基础,以便提高这些机器人有希望的潜力,特别是在高操作速度、加速度和精度方面。
减序处理和组装应用最基本目标就是提高工作空间操作速度和加速度实现给定进程精度通过使用传统串行机器人系统,这些增加需求结束于恶性循环在这种情况下,基于并行结构的新机器人系统请求非常重要。 并行结构为主动振荡提供理想平台。整合这些适配控件和特殊自适应控件是一种大有希望的有效方法,可使机器人同时提高精度和速度并因而提高生产率
协作Reserach中心562基本题目如下:
参赛机构



