- 提供配置文件
- IT程序提供移动机器人学作为三四学生的主要选题性知识,并同时提供理论和实践编程和网络技能课程基础国际标准(IEE & ACM)整合课程 在线资源 和课程素材 从世界顶尖大学
产品组合
信息技术部
- 信息技术学士学位课程将为您提供需要的知识和技能计算课程 软件编程和网络技术 更新并教 由国际计算机科学专业学院
我们开放创新我们可以与你合作构建量身定制程序 以匹配你的兴趣和需求利用我们的研讨会 专题 高级项目 独立学习课程 我们可以为您提供合适的程序信息技术学位将帮助你为今天高要求就业市场的成功做好准备除技术知识外,我们强调综合技能开发,以便学生发展通信技巧和理解工作环境
毕业生职业机会包括:数据库管理员/开发者、计算机图形设计者、数字内容创建者/编辑者、IT支持、IT安全分析师/工程师、网络管理员/工程师、程序员/软件开发者、系统分析师、Web设计者/开发者、Webmaster
清迈Payap大学信息技术系将为您提供计算机、通信和联网技术高质量教育,费用比美欧大学低几分清迈市安全 愉快 趣味 廉价生活本市是亚洲最高级节日目的地之一,吸引全世界各地的青年加入我们
-
研发
- 寻题
- 人工智能
- 计算机图形多媒体系统
- 决策支持系统
- 电子商务系统
- IT管理
- 移动机器人平台
- 开放创新
- 语义网页技术
-
-
额外课程员活动
-
- 课外活动通常是自愿的这类活动超出信息技术课程正常课程范围,这些课程往往实用并关涉兴趣领域。
-
IT系列研讨会
-
- IT系列研讨会为IT学者和业界讲演者提供介绍和讨论当前工作的机会内容包括45分钟讲演和15分钟问答时间
-
研究赠款
-
-
- 会计信息系统对内部控制有效性的影响
- e-Resear数据库管理系统
- e-Flookales更新本地值:ThaiLanna案例研究
- 寄存式计算信息系统
AFRON10元机器人设计挑战
- 博士托马斯泰利获绑定机器人类AFRON10元机器人设计挑战首奖挑战由非洲机器人网络主办,2012年6月14日至9月15日
显示Dr.Tomas Lolybot基本是一个修饰USB手杖轮子、一个Chupa-Chup触控器和一条线感应器补丁到另一手杖机器人设计由用户从零开始搭建,总成本为8.96美元(不包括腐烂部件)。
由Thomas Tilley设计, 住在泰国的计算机科学家先使用黑客PlayStation控制器,在本案中,系绳系控制器USB电缆,Tilley将摇摇电机绑到一对轮子上Suckerbot部件列表达8.96美元,但真正的天才是Chupa Chups泰利需要一种方法让机器人感知 万一它碰到点什么,吸盘点出东西时 吸盘权推杆向前传递信号 信号寄送处理器...
-
高层设计
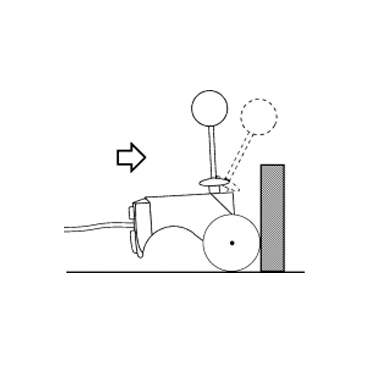
- 原创视觉是搭乘轮子电机 沿地面拉动摇杆垂直扩展用双笔或叉子模拟缩子, 将转换成简单波感应器或原始加速计,机器人可沿地面滑动直到它撞上东西, 后它可逆转转转转转转并再次驱动直到它撞上别的东西并用代码控制机器人 满足最小需求
不足10美元Lollybot为学生提供双轮编程机器人,包括波感应器、线沿传感器和美味(最好是草莓和Cream香料)Chupa Chups系统使用常用工具从随时可用部件构建,简单易行,学生可以单行或分组自建
-
-

黑客摇杆
- 游戏杆提供廉价插接USB接口17开关数字输入器(16按钮加同源按钮)、4模拟输入器(2缩图单加X&Y轴)和2转动电机输出
-
原创ChupaChupsbum传感器
- 当他多想设计时,他意识到井端质量-权重足以使缩杆弹簧仍然能返回中心位置-将改善波传感器并意识到经典11gm Chupa Chups(尤其是草莓和树香味)应有效爬上拇指棒上 他们看起来像眼睛或天线名字ChupaCheps来自西班牙语动词“suck”,所以他原决定称机器人为Suckerbot
-
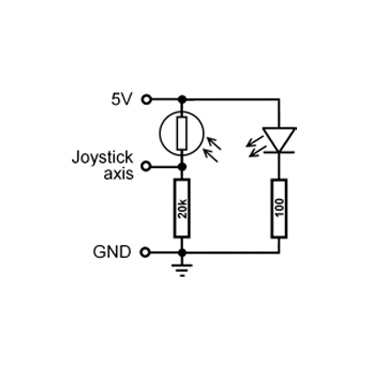
Lollybot电路
- 单线检测器/传感器电路上显示轻从抗电量和20kr3电阻搭建电压分解器右手电路为光反射二极管(LED)LDR安装小管保护它 光从LED直接达不到它抗光量随光量增减而变化假设我们用此电路替换原机杆阻抗器,机器人软件可读取摇杆轴值并判定传感器是否定位于暗线或浅色背景上
链表部件
- 制造Lollybot所需零件都很容易在泰国买到,除纸剪外,可单件量购买多数部分有代表性在线价格为多项项目(例如一包四块胶棒费用1.99
- 双电像USB欢乐棒-泰国这里可用100THB(3.23美元)。
- Chupa Chups(11gm)-网络买100棒棒糖25.
- 万元电阻器-必须至少购买10元网络0.15元(每名机器人0.03元)
- 20K/ 2005, 4/Wat/en-必须购买最少10美元Objective++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
- 绿色LED5毫米20mA-0.84
- 光依赖抗体-1.32
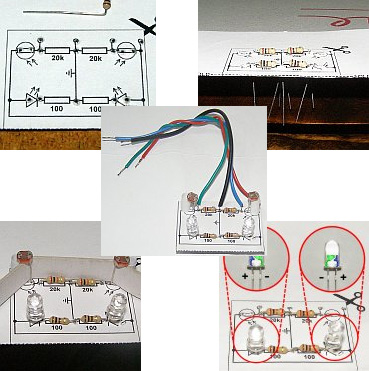
- 线传感器电路模板
- A4拷贝80gsm-ream500表费用9.29美元(每页0.02美元)。
- 纸板近似10mx10cm-0.00美元
- 粘贴棒或粘贴板-四块胶胶棒费用199美元(每块0.50美元)。
- 小果盒斯特劳-0.00美元
- 塑料饮草(Brown或Black)-0.00美元
- 彩色钩线-0.95美化4x12cm四大颜色
- 容器盖轮子-0.00美元
- 容器盖轮站-0.00美元
- 旧自行车轮胎内管-0.00美元
- 纸张剪片(大)-0.02A盒100剪片耗资0.99美元(每页0.01美元)。
- 螺旋终端块-0.39
- 线服装机-100机架费用16.95美元/机架0.17美元/机架
- 塑性/染色珠子-一包360珠子费用197美元(小于0.01美元/珠子)。
- 热熔胶棒-8棒打包2.99美元(每棒0.38美元)。
- 总计=8.96
-
逐步指令
- 1) 欢乐棒黑客拆解
2) 欢乐棒黑客:切除侧面
3) 欢乐棒黑客:清除电机
4) 欢乐棒黑客:汽车洞
5)欢乐棒黑客游戏
6)线感应电路:
7线传感器电路:阻抗器
8线感应电路:光仿二极管
线感应电路:光从抗波
10线传感器电路:线性
线感应电路:连接到欢乐台
线感应电路:全集
13轮:制造轮
14轮:编尾滑雪
15)Lollybot调整维护
-

步骤1-5
- 1) 欢乐棒黑客拆解
2) 欢乐棒黑客:切除侧面
3) 欢乐棒黑客:清除电机
4) 欢乐棒黑客:汽车洞
5)欢乐棒黑客游戏
-
步骤6-10
- 6)线感应电路:
7线传感器电路:阻抗器
8线感应电路:光仿二极管
线感应电路:光从抗波
10线传感器电路:线性
-

步骤11-15
- 线感应电路:连接到欢乐台
线感应电路:全集
13轮:制造轮
14轮:编尾滑雪
15)Lollybot调整维护
绘图
最终产品
Lollybot建房工作坊@Payap
- 调度程序
- 星期五2013年9月16日
2:30-330PM编程LOLLYBOT
黑手党:Thomas Tilley在TEDxChiangMai2013
- 博士Thomas Tilley是澳大利亚计算机科学家,在Payap大学国际信息技术课程教官昆士兰大学计算机科学博士生(2004年)前,他完成数学计算机科学BSc课程(Adelaide大学)和信息技术优异学位课程(昆士兰Griffith大学)。研究兴趣包括形式概念分析、形式方法、软件工程和分布式系统上大学前,他曾任三联电工半时学习电子工程技术员,获取基本电子技能,使他开始享受硬件和软件黑客技术最终导致他在2012年以不超过10美元建立机器人比赛中胜出现时他正在教社区项目中运用这些技巧
-

























