- 提供配置文件
- ROBOTNOR-挪威Trondhei高级机器人中心由NTNU和SINTEF资助开发下一代机器人技术概念,推广教育产业创新
产品组合
空间机器人
-

NCUBE卫星
-
- enCube-2号于2005年10月27日启动立方体卫星 重小于1kg内含姿态控制系统使用磁圈驱动器和磁强传感器测量任务接收并传输来自船舶和驯鹿的AIS信号航天器到达轨道,但没有实现通信
sakstan拜科努尔宇航场于2006年7月26日发射NCUPE-1号(因驯鹿跟踪任务改名Rudolf),但运载火箭Dnepr在发射时失事
-
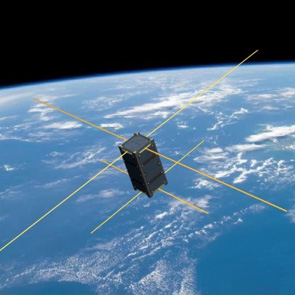
NUTS-NTU测试卫星
-
- NUTS卫星为2单元CubeSat设计,由NNU学生设计计划到2014年底设计、构建并发射卫星数省NTNU学生参与项目主有效载荷是红外摄像头 摄像头称重力波实现此目标时,卫星方向必须控制,摄像头必须在规定时间槽指向地球负责判定和控制姿态的系统由陀螺仪、磁强计和太阳传感器组成,并循环起作用器
-

信号控制
-
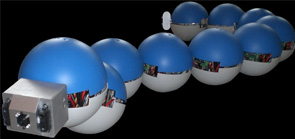
- AUVSAT是一对球形机器人,由三种正交反射轮驱动执行姿态控制实验飞行器模拟编队飞行航天器运动,但设计上使用中度浮力在水下工作以模拟轨道条件
工序
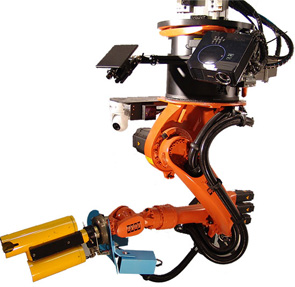
- 工业机器人是行业中无情的员工取地画焊接各种对象自动控制可重编多功能操作程序核心动作是传感器和软件驱动软件表示应用先进算法和数学模型提高操作者精度、可靠性和效率环境知识模块工具处理使工业机器人有能力处理各种任务工机应用区正在增加 人机界面正在变化机器人通常是几度自由交换工具的操纵者,尽管有各种设计
-

下一代编程
-
- 2009年启动的这个项目旨在开发挪威工业下一代机器人技术项目历时5年,预算为36磨坊NOKSINTEF应用网络技术项目有8个伙伴:SINTEF、NTNU、Statoil、Hydrod工程公司、Glen Dimplex北欧公司、SbSearting公司和机器人Norge公司项目主管是Dr.素文P贝赫SINTEFICT
-

UR5从通用机器人
-
- 通用机器人5操作器臂安全静默支付机器人易用接口ROBOTNOR拥有数架UR5机器人可自行执行任务或通过合作共同解决任务UR5重只有18.4公斤,有效载荷容量为5公斤UR5的主要好处之一是它不需要安全卫士机器人臂符合ISO协作机器人标准,非常静默,甚至在操作期间也是如此。机器人可用平板操作板或计算机连接以太网控制
-
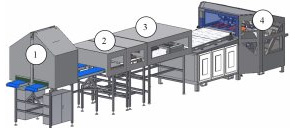
PINEBONE运回 SALMON
-
- 现有自动处理鲑鱼系统无法从新鲜宰宰鲑鱼中清除所有骨骼片片受损或骨折,如果骨架取出不配鱼数日即减少储存寿命和最终产品质量
离岸作业
- SINTEFICT自2005年以来一直与挪威石油和天然气公司Statoil合作开发近海机器人远程检查和维护流程设备与NTNU合作,在挪威Trondheim建了一个实验设施,以展示这类操作的概念解决方案
开发出解决方案,可用作完全运行近海机器人系统基础此外,还发现并系统化了若干挑战。尚需满足这些需求后才能成功部署这些系统
开发技术包括机器人干预工具化、基于3D模型远程控制操作法、自主对象定位和干预、在线远程操作和碰撞控制
-
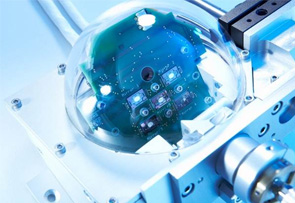
三维摄像头为robotes提供 更好 View
-
- TACO(三维自适应相机与对象检测和改变)EU项目旨在通过改善3D反向特性感知系统提高服务机器人能力并增强他们以更自然和人性化方式与自然环境互动的能力
-

与适配通信链路
-
- 博士项目启动日期:2013年8月
监督员:KristinYPettersen(ITK)、Hefeng东(ITT)、Ingrid Schjelberg(AMOS)
更多项目资讯将很快添加
-

水下模拟实验室
-
- NTNU最近建立了应用水下机器人实验室实验正用于海底机器人应用研究
SNAKEROBOTS
- 几年后蛇机器人将协助地震后搜救任务,并在流程管道内执行维护操作ROBOTNOR几年来对蛇机器人进行研究,并接近实现机制潜力
-
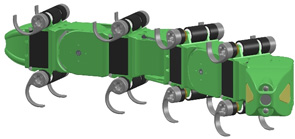
Memba-Our新Mudula纳克ROBOT
-
- mamba装满新功能 允许我们展示蛇机器人新应用机器人有几类模块可任意排列基于机器人预期应用所有模块均密水化,允许机器人配置在水下操作
-

wheeko-SNAKE机器人
-
- wheeko实验平台 我们开发研究蛇机器人跨平面运动机器人由10个完全相同的联合模块组成,模块用被动轮覆盖机器人异步地面摩擦性能,使机器人向平面向前滑动
-

安那孔达-消防赛snakeROBOT
-
- ROBOTNOR蛇机器人Reserach启动开发Anna Konda机器人开发基于自推消防水管的视觉,可爬入燃烧楼,自扑灭火而不置人消防员于险境
-
KULKO-SNAKE遥控传感器
-
- 库尔科实验平台调查蛇机器人在有阻塞的环境中运动游荡环境需要蛇机器人以某种方式感知环境并允许蛇机器人在混乱环境中向前滑动需要机器人身体足够平滑,即无阻性特征
-

AIKO-SNAKE机器人
-
- 爱子公司是我们第一批蛇机器人之一,开发的目的是开发便携式系统实验蛇机器人运动机器人由数个完全相同的联合模块组成,每个模块两度自由
-
Piko-Pips检验ROBOT
-
- 管子内装30年服务后长成什么样先进机器人系统专门知识允许ROBOTNOR科学家搭建新型机器人检查复杂管道系统
双轨迹
- 轮式机器人是简单任务极佳工具,例如从一个地方向另一个地方移动对象或增加机器人臂范围等更难任务轮式机器人一般简单廉价机制高重量容量可带重设备或电池延长机器人操作时间轮式机器人有多项应用,例如向操作员提供视频直播或测量远程设备噪声水平
-

库卡YOBOT
-
- ROBOTNOR获取2KUKAyBots用于研究实验KUKAyBot最能描述为台式移动操纵器,由五度自由操纵器附属全向移动基omni轮子允许yBat基础在所有方向自由移动
-
eskur-mobilemaniu
-
- 移动操纵器由连接移动机器人基地的一个或多个机器人臂组成相关应用领域包括保健机器人、制造、机器人助手和安全ROBOTNOR研究者正在路径规划、控制力、机器人视觉和定位等领域内与移动操纵者合作
-

Trile-PioneerROBOT
-
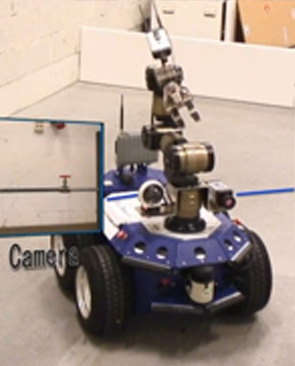
- trille修改版Adept移动机器人P3-DX机器人配有服务托盘,可提高调低以适应任务的具体需求机器人还配有超声波传感器和激光测距器,使其能够检测并避免阻塞
-

单片定位系统
-
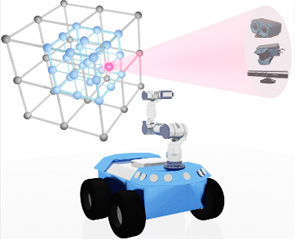
- 移动机器人通过环境自主智能移动依赖定位技术定位指查找你身处世界的过程,例如查看地图或检查GPS(机器人并不总是那么容易实现)。当今工业系统依赖超声波、广播(Wi-Fi或GPS)或光学识别等具体技术每种技术都以物价或复杂度求精度
-
Seamlis-Mergi
-
- 移动机器人操作器(带一个或多个附控器臂的移动机器人)将普遍解决未来许多工业和社会需求,如帮助照顾老化人口、在岸上和近海工业设施进行自主检查、维护和维修作业、运营未来工厂以及监测环境污染和消除污染
纳诺波特
- 纳米学是一个新兴广域或可定义为构件维度接近纳米尺或定位解析度接近纳米尺的系统
纳米机器人典型概念是可控细菌大小的设备,可用于人体医疗目的尚不存在,但研究最终可能引导我们到那里
关键赋能技术建设和验证这些显微机操作即扫描探针显微镜,因为这种仪表可用于原子解析成像和操作扫描探针显微技术已被使用来移动单原子并构建像功能晶体管由7原子组成,长度4纳米
构造成像由数原子组成,可实际计算为研究挑战控制工程贡献受运动控制高性能需求驱动,并包括开发更好的测量和激活仪表
-

-
光范程序项目
-
- 灯塔项目2013年由NTNUIME教程启动项目的目的是加强并进一步发展由教科系各部门开展的机器人前沿研究
假冒系统
- 失去肢体是对人自由的巨大限制假冒系统试图返回因模拟机器人系统自然运动而丢失的部分功能挑战在于控制人肢体多度自由使用先进软件和传感器技术,假肢可切换各种模式并同时最终控制多度自由精电机控制是必要的 才能不破坏玻璃多数假体系统由EMG控制,测量电磁信号人体是一个复杂系统,当肢体处于不同位置时传感器的交互响应将有所不同高级假肢系统可测量系统配置并相应响应假肢系统帮助下,四肢丢失时生活可恢复
-

-
上层连线模型系统
-
- 近十年间多解手向假肢用户开放即便这些现代手有令人印象深刻的设计并有长链从中选择,控制方法尚无法向用户提供直觉接口
其它研究项目
-
视觉系统
-
- 视觉传感器对机器人理解环境并与其环境交互是必要的视需解决的任务而定-对象识别、上下文理解、导航、质量控制、安全监控-不同的传感器对安全稳健分析和性能是必要的
-
新建群量非目标解析
-
- 缺乏合适的抓取器处理非硬性对象,如来自陆地动物和鱼的鲜肉(肉片段)和鱼类(鱼片或片段)。非硬性对象在形状、大小和纹理上常有差异,无法用传统机器人抓取器处理,像双爪抓取器或类似处理硬质材料开发
-

盲目行尸
-
- 双机移动法高效,机器人通过模拟人运动跨难地形系统总基础是一个机器人 自由度仿取人或二分
-

无人驾驶电车
-
- 欧洲国家拥有广阔的海岸和经济区,深入大西洋和北冰洋,对监测和管理具有挑战性。此外,向更偏僻和严酷环境驱动需要新方法和技术
-

marine车辆
-
- 随着技术的进步和对海底资源需求增加,预计深水和海底载体将发挥越来越重要的作用。上下海面 自主性将变得更加重要




























