- 提供配置文件
- URI机电实验室由机械工系统工程教授Musa Jouaneh协调实验提供状态艺术设施 实验搭建学习并享受机电场现代社会依赖机电系统提供现代方便从智能电机到汽车安全特征,如气袋和反锁制动器,机电系统在日常生活中广泛使用
产品组合
研究项目
- Jouaneh教授及其学生曾参与多项项目,这些项目涉及机器人学、自动化和精密运动控制下图描述最近的一些项目
拆卸操作自动化
- 项目的目标是开发智能工具和方法自动拆卸电子设备第一步,我们开发出自动化系统原型拆解电子设备组装电池,电子设备组装装AA或AAA电池,如远程控件计算器原型系统开发中包括设计拆分工具,使用三维感应器提供力反馈信息拆解模块安装在工具头上三轴翻译机器人上,开发视觉基础应用用Galil数字运动控制器接口控制机器人以模型为基础的计算机视觉应用程序在ViewC++中开发使用Kinect传感器和OpenCV库识别并定位安装在拆解机器人上的电子设备机器人使用模型计算机视觉应用所收集的信息,使用拆卸工具模块执行拆卸操作以去除设备快速适配覆盖和电池
-
-
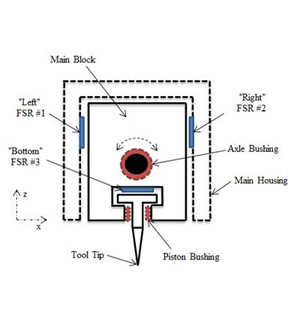
- 拆卸工具概念使用强制感应器检测工具提示应用力
-
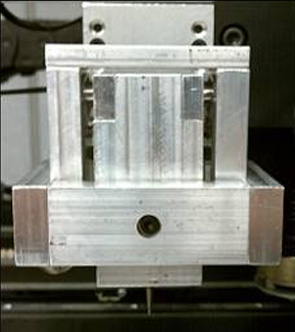
- 图像拆解工具
-

- 机器人拆卸工具平台Kinect传感器安装在机器人上方框架
-
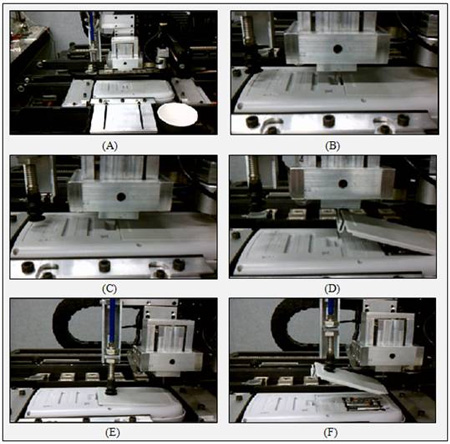
- Snapfit清除拆分序列
-
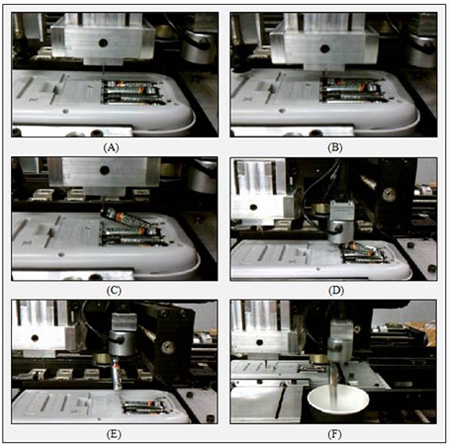
- 电池清除拆分序列
多自主移动机器人共享二维工作空间控制协调
- 这个项目的目标是开发一种方法,两部或多部自主飞行器可同时工作完成某项任务。在这种情况下,任务在于安全高效地前往未知动态工作空间中设定目标,其中包括静止和移动屏障动态目标数应等于系统机器人数,每个机器人应跟踪一个目标自主机器人必须能完成地图搭建、定位、路径规划并定位控制任务地图构建和定位同时使用远程摄像头执行相机图像由中央计算机分析,数据由所有机器人使用本地化还使用电机编码读数更新摄像头图像间位置路径规划使用潜在字段和模糊逻辑规划方法混合完成位置控件使用 PI反馈控制器实现机器人速度方向
-
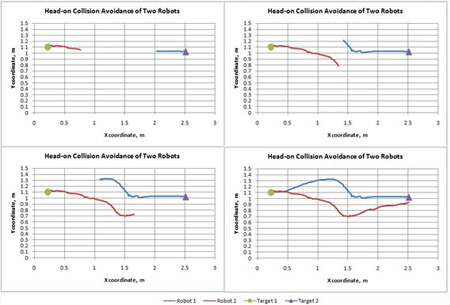
- 双机器人避免正面碰撞使用实系统混合路径规划
-
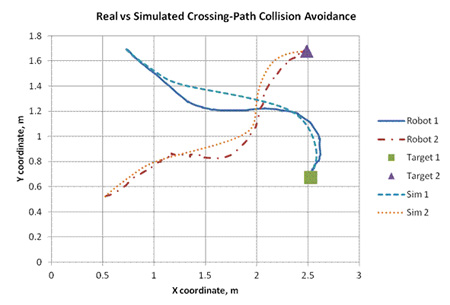
- 交叉路冲突避免二机器人实战模拟
节能多移动机器人探索
- 项目的目标是开发多机器人成功探索未知环境的方法,将旅行耗能最小化方法基于算法方法,特征为迭代成本计算和实用决策开发法扩展Burgard等开发算法多机器人协调探索IEE机器人交易卷21号计及前往勘探点所需能量勘探点是边界目标 边界非监控区算法确定哪个前沿目标和相关能源成本为机器人提供更大的实用性并规划通向目标路径目标选择后,算法会降低周围细胞的实用性以诱导其他机器人探索新领域使用视觉基本快递开发模拟软件测试开发算法探索效果和合作特征结果显示修改算法会降低旅行时间和探索所需能量
-
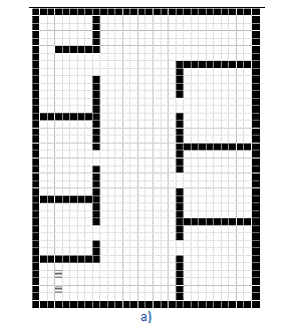
- 探索环境由上图左下角显示二机器人探索机器人感知距离8网格单元
-
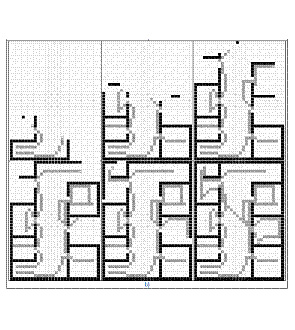
- 复制Burgard方法探索路径
-
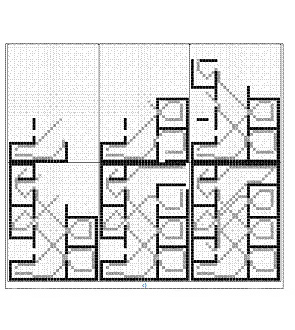
- 修改算法探索路径
-
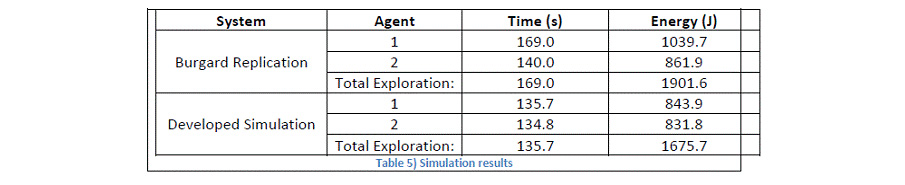
- 旅行时间和能量比较使用Burgard算法和修改算法
编程维护控制移动机器人
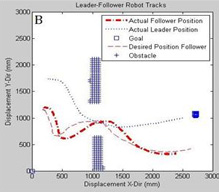
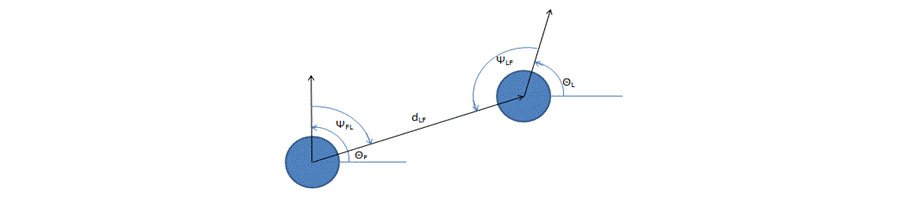
- 项目调查编队维护和控制移动机器人问题目标是开发一种方法 成功允许移动机器人 成功导航 特定编队开发方法基于先行者编组技术并使用组合式场/混淆逻辑导航系统开发法本意分散化向跟踪者提供的所有输入仅来自被动观察车辆间没有通信高端摄像头和色识别算法 用于机器人定位 屏障和目标定位双车iRobotCreates使用蓝牙网络受中央PC控制含色识别器的所有软件均写入ViewBasic
-
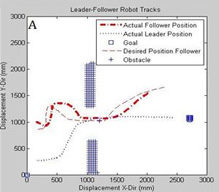
- +LFD=90度dLFD=600毫米
-
- +LFD=-90度dLFD=600毫米
-
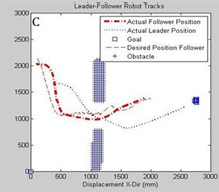
- C)LFD=135度dLFD=600毫米
-
- dLFD=-135度dLFD=600毫米
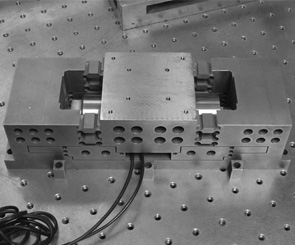
建模控制二轴H框架定位系统
- 项目重点是设计、建模和控制以资本化H形状构造的带驱动XY定位设备系统使用长定时带环绕全系统,包括电动机拉子,转换电机轴旋转运动成线性桥阶乘和直线性Y运动相对于移动桥非线性8级动态模型导出模拟系统运动数项控制策略接受调查以快速精确控制舞台位置
-
-
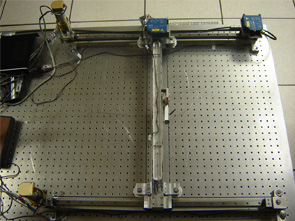
- H框架顶视图
-
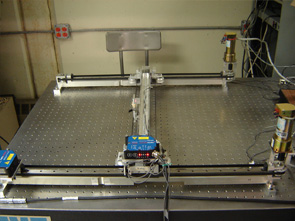
- H前视图框架
-
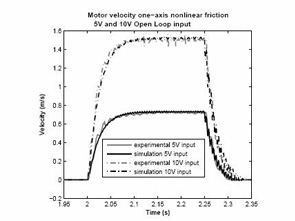
- 单轴开路响应
-
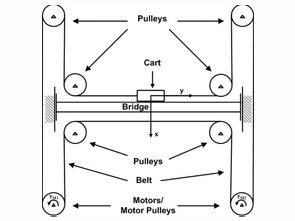
- H框架组件
-
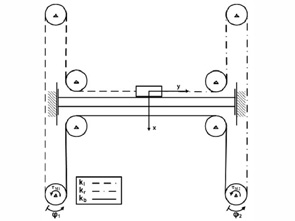
- 八阶模型
-
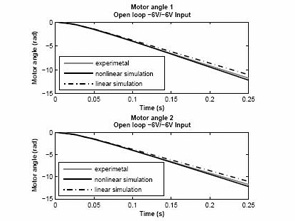
- 二轴开路响应
改进操作系统使用FRIS滤波
- 这个项目调查有限脉冲滤波器使用问题,作为排版不足系统输入形状器输入形状器减少溢出和沉积时间 受稀释动态系统研究三种FR滤波包括盒式车 三角形 半弦素三大滤波响应比对正常步响应和低通滤波响应预过滤二阶系统模拟Matlab/Simlelin数据显示FIR滤波可大大改善系统模拟和实验响应三角Frish滤波对硬件实际实现特别有效
-
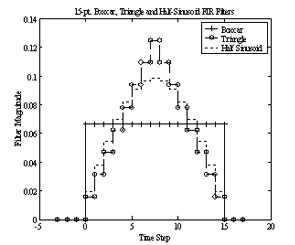
- 盒式车、三角形和半色FI过滤器
-
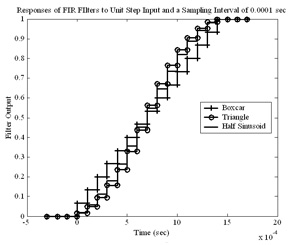
- 三点15飞行情报过滤器卷积并配有单步输入
-
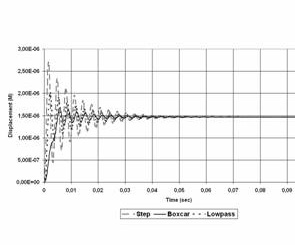
- 模拟系统响应曲线归结为阶梯、低通滤波器和boxcarFrish滤波输入
-

- H框架实验开放循环响应
-
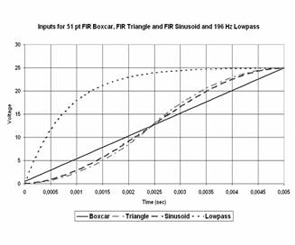
- 输入应用操作系统
-
- 实验系统:Piezo驱动软化阶段
其它项目/教育搭建
-
-
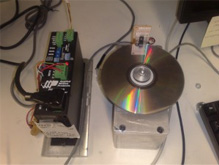
单步驱动旋转表
-
论文编解码器
-

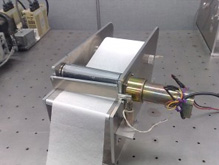
stepper驱动线性定位阶段
-

DC-Motor驱动线性启动器

































