- 提供配置文件
- FroboMind软件平台开源机器人控制系统设计,中心使用相同的泛型平台跨项目优化重用现有工作
产品组合
FroboMind
- FroboMind是一个机器人控制系统软件平台,设计用于现场机器人研究工具提供各种项目、田间机器人和工具使用相同的泛型平台并以此实现最大程度重用现有工作FroboMind开源并允许版税免费商业使用并运行Ubuntu Linux
FroboMind是什么
- FroboMind的目标是规范跨项目、机器人和工具开发并优化机器人软件
- 模块化代码回用以减少软件开发、调试测试耗时
- 扩展性可扩展性,它必须容留小学生项目到高级研究项目的实现
FroboMind软件平台由操作系统、中间件和架构组成,将软件组件组织成层模块并有定义清晰界面
操作系统
FroboMind支持最新的Ubuntu长期支持发布
中间件
FroboMind应用ROS
架构设计
FroboMind架构基础直觉分解场机器人感知、决策和动作任务
FroboMind:Architecture
- FroboMind架构基础直觉分解场机器人感知、决策和动作任务
机器人通过其传感器和机器人反馈并实现系统来感知周围环境结合感知分享和先验知识基于累积知识 机器人任务描述和用户交互 机器人选择行为 以优化任务实现行为动作按时间状态执行
数据流通过连接箭头图解旁边的箭尖表示数据输入,而缺箭尖表示数据从模块输出为了避免概览混淆,假设任何组件都可访问其前身访问数据,因此只有在与理解架构相关时才会显示多连接继承者概述中未包括所有构件可用数据
内部故障诊断、系统监视和事件处理任务分解安全层,以确保这些模块最大程度简洁清晰度并从而最小化软件误差,而这反过来又能保证高度可靠性安全层通过促进行为响应内外部事件提高机器人自主性安全层能激活硬件紧急阻塞电路,但不能反作用或抑制激活
灰矩形表示模块包含以充分描述功能代码不代表实码
机器人
弗罗比特
- Frobit小差分引导机器人设计快速原型应用和田间机器人课程活动设计背后的想法是小成本易建开源机器人平台开发FroboMind架构软件组件弗罗比特差分投手轮目前它分两种版本:
- 小型低价Frobit仅供室内使用
- 大型耐用FrobitPro
Frobit软件
frobit用作FroboMind参考平台,意指FroboMind包含Frobit最新演示实例
下图显示路口导航frobit模例使用轮编码器和gyro相对配置估计
阿马迪略
- Armadillo由南丹麦大学和Aarhus大学于2011年开发FroboMind架构由机器人操作系统ROS.org实施并高度模块化组成
项目
Armadillo目前用于两项目中精密导航行田和人道主义排雷更多信息请访问项目页面
描述性
Armadillo平台由两个独立的轨迹模块和一个互换工具载波模块组成从工具载波模块删除轨迹模块只需移除8门螺旋并断电通信电缆,这一过程需要几分钟时间。
Armadillo电流允许不同电源如电池盒、生成器和未来可持续能源如燃料电池等
Armadillo轨迹模块可视之为自封推进模块,机载电机、电机控制器和变速箱产生弹性车辆平台,轨迹模块和辅助硬件如电池盒和机器人计算机可按偏向式安装权分布或执行中必须携带的其他需求
轨迹模块由3.5kW刷新DC电机驱动i/25齿轮比最高速度7.4千米/小时并预期电容下降25%,一轨模块可提供1kn连续推送并上至1.7kn30秒推送
Armadillo目前携带两个交换式48V100Ah电池,每个重150kg电池包基于深循环铅酸电池支持50%排出允许Armadillo40分钟最差案例操作时间 最大耐用电量正常操作条件中,两轨模块车辆必须克服500N动态摩擦,预计有效操作时间为2.6小时多装箱充电后,车辆可按需运行每一电池盒可在4.5小时内充电更先进和昂贵电池技术,如锂离子技术,将提高按收费计算重量和操作时间的性能
ASUBAT
- Ashus大学工程系与南丹麦大学工程系联合项目
描述性
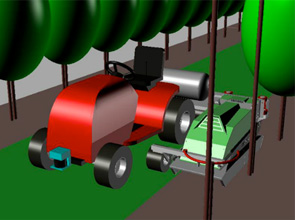
Assey Fergusson38-15花园拖拉机基础使用Topcon AES-25向导系统改装ASuBot机器人计算机FroboBox特征FroboMind架构
ASUBAT应用在一个以有机果园除草为重点的研究项目中今日这是一个相当无聊的过程,禁止除草剂,因此除草通常使用机械过程或除草烧除草离果树近半米距离竞争养分,因此距离内杂草量需要保持在极低水平上通常情况下,每周必须除草
研究项目中,我们侧重于使用燃气机和自主花园拖拉机有机除草拖拉机自主遍历整个果园,确保燃气机不损树实现导航时不使用GNSS,因为有树遮盖GNSS天线问题偶而发生RTK-GNSS接收器仍然相当昂贵,这也降低了机器人的价格。
Assey Fergusson38-15花园拖拉机基础使用Topcon AES-25向导系统改装
FroboMower系统
- FroboMower是一个小型割草机平台,基础是商业低成本机器人割草机FroboMower的目的是进行与割草精密除草有关的现场实验以及相关题目,如面积覆盖、基于低成本传感器的状态估计、强自主行为等FroboMower目前运行并正用于各种项目中
原创电子程序已被运行Frobit固件的机器人替换,FroboMower完全支持FroboMind和Frobit机器人一样RoboCard通过H桥电机控制器控制推送电机,并安装低价旋转编码器在轮轴上提供odorogy反馈三大切割机也受机器人Card控制惯性测量单元、导航卫星系统天线杆和笔记本电脑平台安装支持实验工作
FroboScout
- FroboScout是一个微小微小带分场机器人,设计用于各种侦察任务,并测试平台供字段机器人软件使用FroboScout基础设计目标如下:
在当前项目中,它用于测量任务,这些任务在建设新路时是质量保证的一部分。测量站对安装在GNSS天线下的光学棱柱进行精确相对测量时,它沿指定路线和预定测量点等待定数秒
FroboScout建建于2005年原名CetusBat使用FireCom嵌入式计算机更新后支持FroboMind
草板
- GrassBots目前项目(2013-2015年)涉及低地草场采集作业,供生物气厂和生物炼油厂使用FroboMind集中使用项目期间开发的一些机器人平台
规范化
- 割宽度3米
- 重量:2.200kg(Lynex载波)加800kg(Kongskilde割草机)。
- 驱动水力轨迹
- 电源:100hp柴油机
- 机器人计算机:编码机器人501控制器
- 偏转编码器、Vectornav VN-100IMU、Trimble BX982RTK-GNSS
- 机器人软件:FroboMind软件平台
DTUSMR
- 早在1999年,丹麦技术大学建12个小型移动机器人平台,用于教学和支持论文基础研究持续维护升级这些机器人仍然健壮并被自动化控制局DTU电气工程广泛使用Mobotware软件运行
Mobotware软件
Mobotware是丹麦技术大学DTU电气工程自动化控制开发基于插件的软件框架软件用于移动机器人教育研究并移植到各种硬件平台和应用程序中重要设计标准是实时性能控制水平、简易传感器集成、快速移植新机器人和核心系统稳定性并可在违纪编程环境中维护性Mobotware提供简单脚本机器人控制语言支持非技术员使用
FroboMind集成
Mobotware组件添加FroboMind以包括支持SMR其优势在于它允许使用FroboMind和ROS包,同时仍然从Mobotware高级实时性能中受益
前机器人
- 列表机器人基于Freobmind前身FireCom嵌入式计算机
岩质机器人
- amobot由南丹麦大学开发Casmobot缩写计算机辅助斜率移动机器人Casmobot视觉设计开发斜坡割草机应用模块,使其能够半自主执行
Casmobot基础使用Freobmind前身Frerocopic嵌入式计算机
Casmobot是机器人平台中第一个由Nintendowimote远程控制开机时滑稽思想 周五晚下午机器人实验室 证明是用户友好机器人控件的伟大代言人 维摩特似乎比工业标准遥控器 更直观
荷尔比博特
- Hortibot原丹麦农业科学院开发,现为Oarhus大学DK分校
hortibot工具载波可遍历田从田角开始沿行使用ECO-DAN(现由ClaasAgrosystems获取)的行照相机转行端使用Gyro传感器转行并沿邻行驱动等
数件工具为Hortibot制作,最显著的是细胞喷雾器原型摄像头持续拍下地面图片并分析图像以确定作物位置并用图象除草后排一排喷嘴激活,只对检测到杂草的单元格(4x10cm)喷洒
时间杂志选择Hortibot为2007年最佳创举
研究项目
-
-
研究项目
-
- 使用燃气机和果园自主拖拉机有机除草
- 精准喷草行裁剪
- 地块和草坪自发除草
- 人道主义排雷
- 参与FieldRobotEvent2012
- 线标识足球场
田机器人暑期课程
- 何必浪费暑假在沙滩无所事事呢? 何必能与南丹麦大学同校生一起兴建自主田机器人以可持续生物制作?
资讯类
- 设计开发田机器人辅助植物
- 夏令营每年开课(全时学习)
- 工程学院Odense南丹麦大学
- 7.5ECTS个人口试按丹麦7分级
需求
您必须注册工程或科学研究程序并读过第四学期设计、机械学、计算机科学、物理数学等课程免费面向BSC和MSC学生信息素材页面获取更多信息
-

-
田机器人暑期课程
- 跨学科项目组与设计学、机械学、电子学、机电学、计算机科学、数学、物理等各组自建田机器人并有机会参加国际竞赛FieldRobotEvent























