- 提供配置文件
- 康乃尔大学自来水飞行器团队设计并搭建AUV用于竞争和研究球队和车辆因性能高超和古老优异传统而得到行业专业人员的表扬和支持
产品组合
车辆
- 自主水下车辆
自主水下飞行器为机器人潜艇它们是新兴自主无人飞行器领域的一部分,主要用作低成本侦察工具。AUV都计为可支用性与可替换性可部署于危险环境而不冒人潜水员风险经济方面,廉价可扩缩性使AVs理想化大规模和长期数据收集任务
今日AV三大领域使用:军事产业、近海产业和大学研究美国军方和国土安全部有兴趣使用AV探雷、港口巡逻和反监视近海产业使用AUV设备检验和海底剖析石油测量大学研究者常使用AUV系统促进具体研究项目,需要自主性和范围,只有AUV系统才能提供敏感数据采集任务如野生生物监控和水剖面分析,AUV系统是持续收集大套样本数据的唯一方法,因为它们相对较小和不显眼性
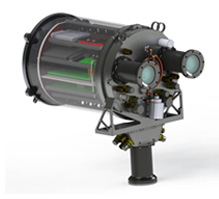
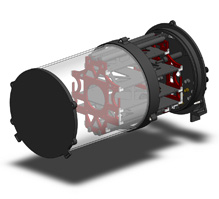
Killick:2012竞赛/研究车
- Killick是CUAV-2011车辆,联合竞赛和研究飞行器设计侧重于缩小车辆平台的大小和重量,同时维护完全竞争能力和控制属性主要的改进包括强架构件和压力容器、精简电子系统、改良传感器套件和改进视觉算法
密钥状态:
- 深度评分:50平方公尺(丙型壳)、250平方公尺(铝壳)
- 最大速度: 1.4knts
- 重度:75磅
- 整体维度: 31Lx21Wx19H
- 运行时间:1.5小时
传感器 :
- 多普勒速度日志
- 温度传感器
- 自定义水手机
- AVT GUUPY下向摄像头
- AVT古比前向摄像头
- 自定义搭建IMU
- 3DM-GX1IMU
- 深度传感器
- 内部压力传感器
- Sparton GEDC-6Gyro-Enceed数字指南针
特征:
- 机架系统
- 集成相机
- 压缩窗体因子
- 以太网和自由光系系
- 可靠电源系统
- 可交换热电池播客
- strafing推送器
- 冗余主密封系统
- 湿室系
- SEACON水下连接器
- 插接串行
- 真空密封船体
-
-
-
Killick电气基础设施
- killick电系统包含驱动器、传感器和计算机所有电源和序列基础
今年最大变化之一 遍历全电网基础设施减少车辆内线路由需求,所有带线离开主船体的板都通过死友 Molex连接器连接很容易把车内线数减半,使例行电保容易得多
所有保有计算机板均由团队成员设计并填充
-
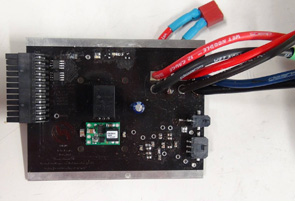
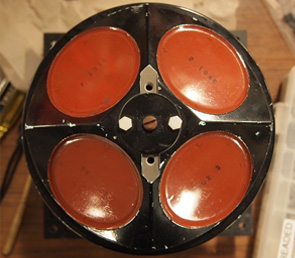
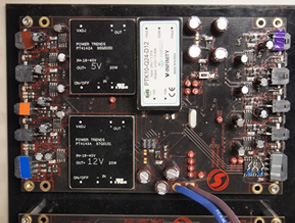
电源系统
-
- killick电源系统取电池播客电源并转换成传感器和计算机受控电压提供隔离5V、12V和24V轨迹供各种传感器和机板使用
-
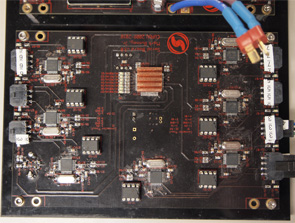
机电系统
-
- 机电系统包括驱动推送器、鱼雷发射器、标记下降器和抓取器的所有电气基础设施并连接开关箱 允许软件访问任务启动按钮 杀电路
-
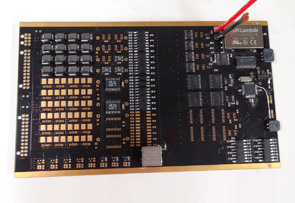
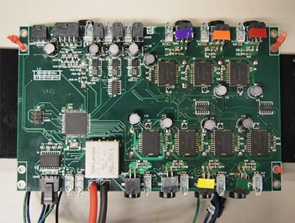
传感器控制系统
-
- 传感器控制系统包括控制Killick各种传感器的基础设施以及传感器与计算机之间的通信其中包括通用输入输出板简单传感器接口和串行板在棋盘、复杂传感器和CPU之间提供简单通信
-

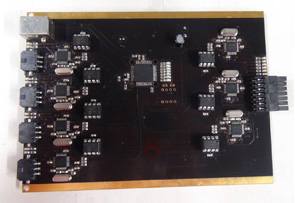
自定义被动声波传感器
-
- 水听器是一种被动声波系统,使用四种ResonTC4013元素和模拟设备SHARK-21369判定水下平方相对方向系统能辨别多位频率同时操作和只监听所选频率
可操作20-35khz范围今年开发出执行主动声学元素板,但仍需要进一步测试
-

系索
-
- Killick用以太网系供联机测试
-
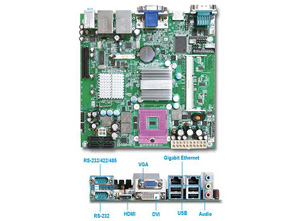
计算机存储器
-
- killick机上计算机由Intel核心I7-2710QE四重处理器组成,它使用小型ITX母板、4GBRAM和Intelx25-Etrip32GB固态驱动为所有任务、机器视觉和控制处理任务提供足够计算电量PCI快递卡提供3IEE1394端口供车辆摄像头使用计算机运行debianGNU/Linux最小化安装与所有外部传感器和启动器板通信由自定义串行界面路由
Killick传感器
- killick使用数组传感器控制车辆和环境感知,包括DopperVelocty日志、2个指南针、深度传感器、2个IMUs和2个摄像头
-
多普勒速度日志
-
- RDI工作马DVL提供位置并启动闭路速度控制DVL提供所有三个维度速度数据,并特征为温度传感器、罗盘和高度传感器所建
-

定向传感器
-
- 微信3DM-GX1定向传感器提供三维空间内飞行器向量、投放率、滚速率和速度率数据用在控制器的卡尔曼滤波中,以便提高传感器聚变速度并加速控制响应
-
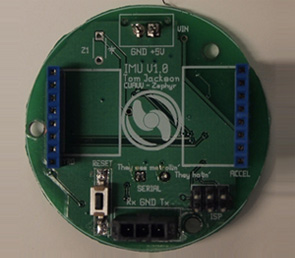
自定义IMU
-
- 惯性测量单元测量滚动、投影和雅乌速度以及xy和z加速微控制器上还有可调整滤波过滤数据数据自动更新并用RS-232通信线发送计算机
-

摄像头
-
- killick使用三摄像头,二前向和一下向
2AVTGUPYF080C颜色CCD相机用于车辆前向视觉AVT GUPYF-046色CCD相机用于车辆下向视觉
-

深度传感器
-
- 模拟压力数据(最高100PSI或约55米地表下)取自MSI超稳定-300压力传感器,以420mA流路操作
-

斯巴顿指南针
-
- 斯巴顿GEDC-6指南针还提供三维空间内飞行器向上率、投放率、滚速率和速度率并用加速计和陀螺仪补偿车辆头部磁强计
Killick机械基础设施
- 机械系统由车辆结构、上壳、启动器和外部封套子系统组成这些机构负责电子组件密封,并提供安装点和保护所有传感器和屏蔽所有定制机械组件都是内部开发搭建团队成员设计CAD软件部件后使用FEA软件验证优化设计团队成员搭建Emerson机器商店最终设计
-
上壳压力船
-
- UHPV保护并支持Killick所有串行、电源和传感器界面板计算机启动器控制系统UHPV还作为内部板与外部设备之间的接口
-
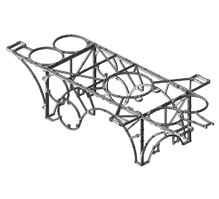
车辆框架
-
- 车辆框架支持并包含压力容器、启动器和传感器加注点框架由CNC机制铝板构建,设计以尽量减少重量和大小
-

启动程序
-
- Killick使用多项定制和COTS电机组件动态地与周围环境交互商业推送器提供五度自由,定制充气系统完成任务
-
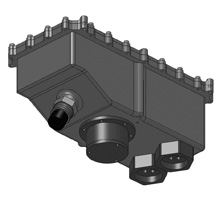
外部封件
-
- killick外压容器外装各种电系防水容器隔离系统免噪并允许机动车辆配置灵活性外部压力容器中包含系统包括水听器被动声波系和交换箱
killick软件
- killick所有更高层次功能,包括完成任务,都通过车辆软件系统浸透软件栈建基于debianGNU/Linux操作系统,并包括自定义共享存储器、串行守护程序、多线程视觉、控件和任务系统自定义软件均写C/C++和Python
- 共享内存
共享存储系统允许同时访问全车软件基础设施全局变量各种棋盘通过标准串行协议同步这些变量,便于阅读写作
- 日志整理
Killick日志系统记录任务运行期间车辆状态允许软件团队脱机审查测试车辆并捕捉稀有软件故障
- 控件
控制系统向Killick提供将传感器数据综合成可靠车辆状态并使用知识控制推送器和电动器的能力
- 视觉
Killick视觉处理系统设计为向车辆提供关于周围任务元素的最新准确数据
- 任务规划程序
任务规划器用Python写成,允许高层任务以简单抽象方式写成
- 实时数据显示和可视化
提高车辆性能的关键在于理解车辆正在做什么,所以我们开发工具显示和视觉化车辆状态
- 模拟器
模拟器允许虚拟环境测试任务这有助于我们验证任务正确性
- HTTP诊断界面
HTTP诊断内面,又称WebGUI,允许通过Web浏览器控制基本车辆函数
- 导航和任务元素定位
今年软件开发帮助课程对象定位定位代码生成概率映射对象位置
-
车辆
- 自主水下车辆
自主水下飞行器为机器人潜艇它们是新兴自主无人飞行器领域的一部分,主要用作低成本侦察工具。AUV都计为可支用性与可替换性可部署于危险环境而不冒人潜水员风险经济方面,廉价可扩缩性使AVs理想化大规模和长期数据收集任务
今日AV三大领域使用:军事产业、近海产业和大学研究美国军方和国土安全部有兴趣使用AV探雷、港口巡逻和反监视近海产业使用AUV设备检验和海底剖析石油测量大学研究者常使用AUV系统促进具体研究项目,需要自主性和范围,只有AUV系统才能提供敏感数据采集任务如野生生物监控和水剖面分析,AUV系统是持续收集大套样本数据的唯一方法,因为它们相对较小和不显眼性
drkar:2011竞争/研究车
- Drekar是CUAUV2010-2011飞行器,联合竞赛和研究飞行器设计侧重于缩小车辆平台的大小和重量,同时维护完全竞争能力和控制属性主要的改进包括强架构件和压力容器、精简电子系统、改良传感器套件和改进视觉算法
密钥状态:
- 深度评分:100ft
- 最大速度: 1.4knts
- 重量:85磅
- 整体维度:42Lx28Wx20
- 运行时间:1.5小时
传感器 :
- 多普勒速度日志
- 温度传感器
- 自定义水手机
- AVT GUUPY下向摄像头
- AVT古比前向摄像头
- 自定义搭建IMU
- 3DM-GX1IMU
- 深度传感器
特征:
- 机架系统
- 外部摄像头
- 可扩展有效载荷
- 自定义水下连接器
- 以太网和自由光系系
- 可靠电源系统
- 可交换热电池播客
- strafing推送器
- 可靠密封系统
- 湿室系
- SEACON水下连接器
- 插接串行
-
-
-
德卡电气基础设施
- 德卡电系统包含所有电源和序列基础支持器传感器、启动器和计算机电源系统、串行系统、传感器控制系统以及启动器控制子系统全部设计并由团队成员组成
-
电源系统
-
- 德卡电源系统取电池机箱电源并转换成传感器和计算机受控电压5V、12V和24V在不同点提供
-
机电系统
-
- 机电系统包括驱动所有推送器、鱼雷发射器、标记下降器、抓包和交换盒的所有电基
-
传感器控制系统
-
- 系统包括支持Drekar各种传感器的基础设施以及传感器与计算机之间的串行通信通用输入输出板和串行板用于此
-
自定义被动声波传感器
-
- 水听器是一种被动声波系统,使用四种ResonTC4013元素和模拟设备SHARC-21369判定水下脉冲相对方向系统能辨别多位频率同时操作和只监听所选频率可操作20-35khz范围电系统被动声波系统 今年完全新
-
系索
-
- 与岸通信时,Drekar同时配有以太网系和光纤系,供需要距离控制更大时使用,如远程搜索任务时使用
-
计算机存储器
-
- 机上计算机由PortwellWADE-8067低功率嵌入微型ITX母板、Intel核心2ExtiveQX9300四重处理器、4GBRAM和Intelx25-Etrip32GB固态驱动器组成为所有任务、机器视觉和控制处理任务提供足够计算电量PCI快递卡提供3IEE1394端口供车辆摄像头使用计算机运行debianGNU/Linux最小化安装与所有外部传感器和启动器板通信由自定义串行界面路由
传感器
- 德雷卡尔为完成任务使用数组传感器控制车辆和环境感知,包括DopperVelocty日志、2个指南针、深度传感器、2个IMUs和2个摄像头
-
多普勒速度日志
-
- RDI工作马DVL提供位置并启动闭路速度控制DVL提供所有三个维度速度数据,并特征为温度传感器、罗盘和高度传感器所建
-
定向传感器
-
- 微信3DM-GX1定向传感器提供三维空间内飞行器向量、投放率、滚速率和速度率数据用在控制器的卡尔曼滤波中,以便提高传感器聚变速度并加速控制响应
-
自定义IMU
-
- 惯性测量单元测量滚动、投影和雅乌速度以及xy和z加速微控制器上还有可调整滤波过滤数据数据自动更新并用RS-232通信线发送计算机
-
摄像头
-
- 德雷卡尔使用两摄像头,一向前,一向向下
AVT GUPYF-080C颜色CCD相机用于车辆前向视觉AVT GUPYF-046色CCD相机用于车辆下向视觉
-
深度传感器
-
- 模拟压力数据(最高100PSI或约55米地表下)取自MSI超稳定-300压力传感器,以420mA流路操作
德卡机械基础设施
- 机械系统由车辆结构、上壳、启动器和外部封套子系统组成这些机构负责电子组件密封,并提供安装点和保护所有传感器和屏蔽所有定制机械部件均用CAD软件设计并由团队成员整理
-
上壳压力船
-
- UHPV保护并支持Drekar所有串行、电源和传感器基础内含计算机驱动器控制基础UHPV还作为内部板与外部设备之间的接口
-

车辆框架
-
- 车辆框架支持所有压力容器、启动器和传感器框架由铝盒管构造并设计为最大刚性与紧凑性
-

启动程序
-
- 德雷卡尔使用多项定制和COTS电机组件使AUV多于数组(铝管)。商业推送器提供五度自由 自定义充气系统完成任务
-

外部封件
-
- Drekar外部压力容器内含各种电系,这些系统势必位于上层船压容器外防水容器隔开系统免噪声并允许机动车辆构造灵活性外部压力容器中包含系统包括前向向对面AVT Guppy相机、水听机被动声波系统以及交换箱
德卡软件
- killick所有更高层次功能,包括完成任务,都通过车辆软件系统浸透软件栈建基于debianGNU/Linux操作系统,并包括自定义共享存储器、串行守护程序、多线程视觉、控件和任务系统自定义软件均写C/C++和Python
- 共享内存
共享存储系统允许同时访问全车软件基础设施全局变量各种棋盘通过标准串行协议同步这些变量,便于阅读写作
- 控件
控制系统为Drekar提供将传感器数据综合成可靠车辆状态并使用知识控制推送器和电动器的能力
- 视觉
德雷卡尔视觉处理系统设计为向车辆提供关于周围任务元素的最新准确数据
- 任务规划程序
任务规划器用Python写成,允许高层任务以简单抽象方式写成
- 实时数据显示和可视化
提高车辆性能的关键在于理解车辆正在做什么,所以我们开发工具显示和视觉化车辆状态
- 模拟器
模拟器允许虚拟环境测试任务这有助于我们验证任务正确性
- HTTP诊断界面
HTTP诊断内面,又称WebGUI,允许通过Web浏览器控制基本车辆函数
-
CUAUV活动
- 十二年来CUAUV搭建九台全功能自来水车车辆任务重心完全围绕AUVSIAUV竞赛比赛将视觉、声学和导航任务合并成水下阻塞流,车辆必须自主完成最近CUAUV还执行任务,作为浮教室项目的一部分研究Cayuga湖的宏生生长CUAUV还开展许多志愿者和拓展活动,提高社区对数学、科学和工程的兴趣
-

AUVSI/ONR竞争任务
-
- CUAUV每年的主要目标之一是成功完成无人驾驶车辆系统国际协会的竞争任务环球队比赛这个年度赛事 每年夏天在加利福尼亚州圣地亚哥TRANSDEC设施完成竞赛需要每件飞行器自主执行数列任务,同时保持完全淹没比赛任务包括视觉和声学任务
-

湖研究
-
- 10月22日CUAV与来自SUNYCortland的研究组和Ithaca中学机器人团队成员一起登上浮格课堂项目并开课Cayuga湖口访问的目的是观察除草剂有效阻抗入侵植物Hydrilla向Cayuga湖口传播车辆分两个点部署并送至最大深度12米以观察湖底水下没有Hydrilla另外,看来其他植物生命不受除草剂影响乘车检查浮格工程螺旋桨
-

社区外联
-
- 除技术活动和任务外,CUAUV每年还执行数项外联方案这些方案是回馈社区并提高团队道德水平的好方法去年我们的一些推广活动包括80名初级女童子军讲习班、当地小学2 8周课余课程、Ithaca科学院讲演和参与数项工程事件多样性课程

































