分类
程序员
21XX
大厅地图/类别
大厅41
上一个
三菱电欧
C1:联想机器人
千叶
下个
上一个
下个
导航 :
EXPO21XX
>
机器人21XX
>
H41:机器人软件
copplia机器人学
copplia机器人学
概述
商业剖面
联系细节
网站
发送电子邮件
共享量 :
视频播放
加载播放器
提供配置文件
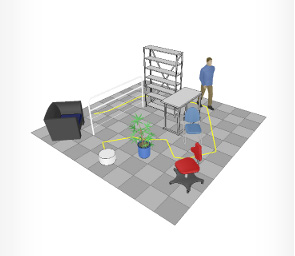
V-REP型瑞士军队刀机器人模拟器:你找不到多功能、特征或更精密API模拟器
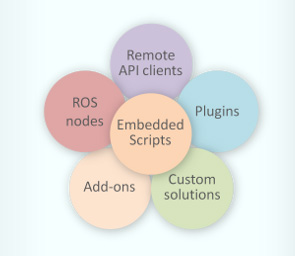
机器人模拟V-REP综合开发环境基于分布式控制架构:每个对象/模型都可以通过嵌入脚本、插件、ROS节点、远程API客户端或定制解决方案单独控制V-REP多功能化和理想化多机器人应用C/C++、Python、Ja
V-REP用于快速算法开发、工厂自动化模拟、快速原型设计验证、机器人相关教育、远程监控、安全复检等
产品组合
项目V-REP
V-REP
V-REP特征
PDF目录
6程序设计方法
更多信息
模拟器和模拟器完全可定制化,六种编程方法互容甚至可手动工作
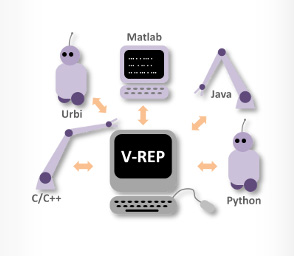
PowerfullAPIs六语言
更多信息
正常API:400函数 (C/C++ & Lua)
远程API:100函数(C/C++、Python、Java、Matlab和Urbi)。
ROS接口:100服务30种出版商类型和25用户类型
远程API
更多信息
100可嵌入式V-REP函数:控制模拟或模拟器远程自身从实机器人或另一PC)易用快速支持同步或async操作优化重数据传输并最小化通信时差
Dynamics/Physics
更多信息
2物理引擎(Bullet和ODE)快速定制动态计算,模拟现实世界物理和对象交互作用(cliision响应、抓取等)
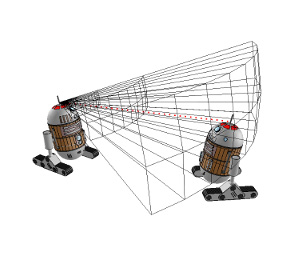
逆向/前向工程学
更多信息
逆向/前向运动学计算机制类型(破封、闭合、冗余、嵌套循环等)。可嵌入式IK/FK算法可用化可运行机器人)
动态粒子
更多信息
V-REP支持可定制粒子,这些粒子可用于模拟空喷气或水喷射机、喷气引擎、螺旋桨等
碰撞检测
更多信息
快速干扰检测 介质或集质, 可选碰撞轮廓计算
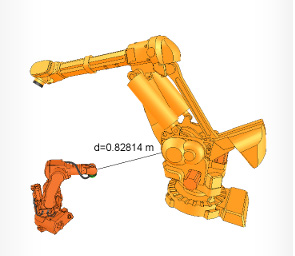
最小距离计算
更多信息
快速精确最小距离计算
裁剪模拟
更多信息
模拟表面切割操作使用各种定制切割工具形状
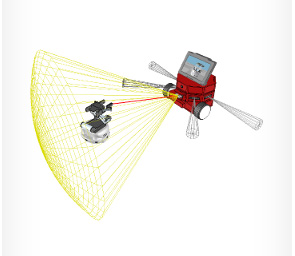
近似感应模拟
更多信息
强健实战近距离传感器模拟:在可定制检测量内执行精确最小距离计算多连续操作比离散射线传感器多
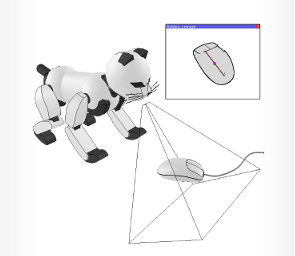
视觉传感器模拟
更多信息
视觉传感器模拟内置多图像处理滤波完全可定制并可扩展(例如通过插件)
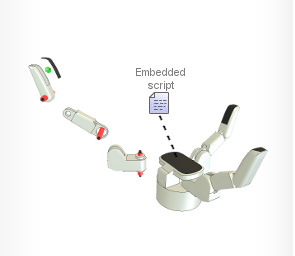
楼块概念
更多信息
从传感器或启动器到全机器人系统的任何事物都可以通过合并基本对象和通过嵌入脚本连接各种功能而建于V-REP内每一场景对象都可自带嵌入式脚本
路径规划
更多信息
全新路径规划2至6维化非全新路径规划类汽车自定义路径规划算法也得到支持
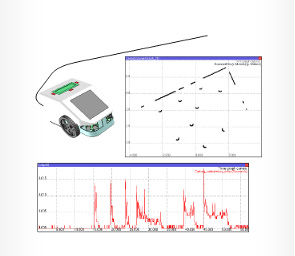
数据记录可视化
更多信息
可记录数据流种类繁多(包括用户定义)可显示时图或可相互组合成x/ygraphs或3D曲线
自定义用户界面
更多信息
无限制数完全定制用户界面元素并配有集成编辑模式自定义Windows式对话框当然通过插件支持
集成编辑模式
更多信息
相邻场景版/组合外,还支持特殊编辑模式,包括网状编辑模式(包括半自动原形提取法)或路径/轨迹编辑模式
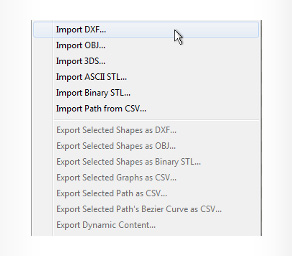
易数据导入输出
更多信息
支持文件格式(同时通过API调用):URDF、COLLADA、DXF、3DS、OBJ、STL
全权运动库
更多信息
eflexes运动库IV完全支持并提供运动控制系统瞬时轨迹生成能力
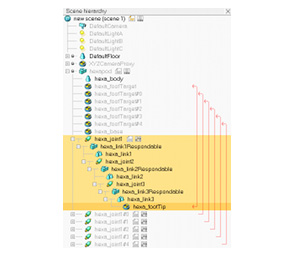
全特征场景分层
更多信息
场景组成直观视觉化,显示对象名称、类型、相关控制脚本、循环闭合、选择和可见性状态、警告等
便捷模型浏览器
更多信息
集成模型浏览器支持拖放操作(并模拟中!)方便场景组成可用模型库每版更新后用户很容易扩展
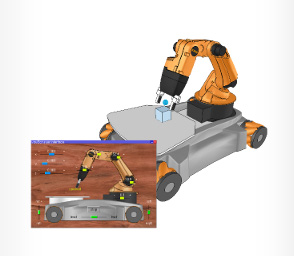
完全交互
更多信息
模拟期间还完全交互作用:模型及其相关行为可移位、旋转、拷贝/粘贴、缩放、擦除等无需调整代码
免费教育许可
更多信息
教育实体(hobbyists、PROEDU免费使用V-REP PROEDU源码所有元素可用参考许可页面详解
自由玩家版本
PDF目录
V-REP播放器免费版可用并允许运行并和V-REP模拟
多特征
更多信息
e.g.多级反转录制片机、无线通信仿真机、油漆焊接机模拟机、静态和动态纹理、详实文档等
大厅地图/类别
大厅41
上一个
三菱电欧
C1:联想机器人
千叶
下个
上一个
下个