- 提供配置文件
- 获奖机器人实验室瑞士AILABIDSIA建建建于2007年实验室应用人工智能方法处理各种实机:移动机器人、操纵机器人和人形机器人实验室位于瑞士Manno-LuganoSUPSI网站
产品组合
学习机程
-

-
- 局部可见环境中学习机器人
硬联动预编程机器人如TU慕尼黑人形双行和BU慕尼黑快车执行令人印象深刻的任务但他们不学习像人
如何从经验中学习传统强化学习算法仅限于简单反应行为,对实战机器人效果不佳
机器人实战环境学习需要新奇算法学习识别感官输入流中的重要事件,并暂时记住适应性动态内部状态直到存储器帮助计算正确控制动作
最有希望学习记忆的方法包括循环神经网络、策略梯度和最优有序问题解答器雄心勃勃的长期目标是为真正的学习机器人安装全机GödelCoteSys组的研究题目包括:DLR人工手和iCub小机器人人工好奇心和创造力,AM180cm双行进演化,视觉注意力和不受监督学习运动机器人和机器人汽车,人类安全与学习机器人交互
不仅研究实机,还研究虚拟机,生活在三维游戏式世界中,模拟物理实战实战实战实战实战人造蛇等非轮式学习机器人它们的导航问题比轮式问题难反之,他们能处理粗糙地形
-
博洛皮克可容性
- 僵硬弹性如何提高人臂和机器人臂性能定向建模研究将综合详细的生物物理模型和机器学习,实现对嵌入式高维可变阻抗机器人系统最优控制
多工机比人强得多 但也非常僵硬比方说,人可以更深入地扔物体并更优雅地捕捉它们,暂时将能量存储于弹性带和肌肉中然而,这种弹性驱动器比传统机器人使用法需要更精密控制算法STIFF财团的目标是为高度生物模拟机器人手臂系统配置敏捷性、强健性和多功能性,即人体运动系统特征,理解并仿真人类中枢神经系统有效运用的可变僵硬范式关键成分研究 解剖精密骨骼建模 人臂手项目将开发新方法理解人臂如何调适阻抗力,例如改变联包层次或调整反射增益阻塞手和臂 使用强机器人操纵器 强制扰动硬性弹性目前在人工实验室任务中被利用,我们将调查自然任务中的僵性依存行为,如投球或插入插孔现有闭环系统识别技术将通过非线性时间变量技术扩展,以识别任务达抓时行为grasp力调和和手肌肉活动关联将通过机器学习技术获取并转至机器人系统最后,对详细生物物理模型收集并验证的优化技术将转归新生物变异机器人可变阻抗作用
-
-
-
-
机器人群爆
- 数十年教授Schmidhuber的演讲有像上表那样的幻灯片
自然千年问题显示 20世纪最有影响力的发明 触发并支撑着人类群爆数以十亿计的人将甚至不存在没有它
当前我们生活在机器人人口爆炸中少数人类停止活动的国家最能见度上方奇特人口金字塔(2025年预测数):少青年多老年人归根结底,所有国家将具有相似的人口统计特征
由谁做所有工作机器人,当然1980年只有3万机器人2002年,已有1,000,000人,近一半在日本,三分之一在欧洲,特别是在德国,这是世界第二大市场
机器人群爆最终可能超越人体,一旦认知机器人不必再硬联结而自学TU慕尼黑认知机器人实验室正在研究的
-
-
居家自定义编程
- roboCup世界冠军Alexander Gloye-Forster(目前IDSIA)和他的团队搭建首台自建机机器人可自主恢复某些类型意外损坏,通过自适应自建自建模型取自激活感知关系,用于生成前移引用Gloye博士
摘自Gloye等2005年文章上段应用到机器人的相同技术 不够精确 现在可以应用解决 受损电机问题[.]机器人四轮全向,当一电机受损时,机器人有足够的冗余性仍然全向驱动,但机器人PID控制器试图控制四电机机器人中当然可以有不同的pID控制器, 当电机失效时,我们可以从四轮转换为三轮控制器但是,如果电机部分失灵(它开始提供少功率,例如电机热化),最好能有方法修改高层控制发送命令机器人电子技术可以是黑盒,我们不想要或无法修改实验中,我们取一机器人四电机互连视觉系统跟踪机器人一段时间并学习预测对命令响应函数,如上所述并成功对受损机器人应用联机校正可见##受损机器人驾驶行为类似于无故障机器人机器人慢一点, 但它能再次精确驱动简单实验显示 机器化游戏期间 做这些类型校正是可行的万一电机完全失效或断电,高层控制可允许机器人驾驶一段时间,复习驾驶行为并应用在线校正结果是机器人几秒后恢复功能,因为导师(中央计算机)知道寄送命令
-
-

- 自2004年决赛
-

- Gloye-ForsterFU-Fighters中的一员在快速联赛中赢得了2004 RoboCup赛程(用摇杆对战的人没有机会上场 ) 。机器持续使用人工神经网建模四轮全向驱动电流属性
-
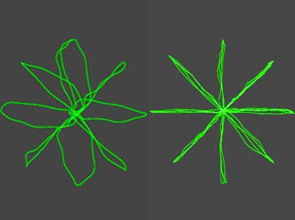
- 左转 :受损机器人无法再执行精确星形驱动模式
右转 :同机器人快速调整神经模型运动命令和感官输入之间的关系,并成功用它规划并优化驱动轨迹,J写论文的精神施密杜伯
TU慕尼黑cogbotlab
- 任务 :建机器人学习
工具 :循环网络 贝叶斯方法 增强学习 进化 最优搜索
论理 :最优通用学习者,通用贝叶斯感应,科尔莫戈罗夫复杂性,哥德尔机
我们正在经历机器人人口爆炸1980年只有3万机器人上百万人 近二分之一在日本 三分之一在欧洲 特别是在德国 全世界第二大机器人市场
几乎所有机器人都预设线无法像人类学习经验少数适应者通常只是响应当前感官输入而不使用过去更多相关事件是否有最优学习非反应行为方式 泛型未知环境最近理论洞察力确认答案为是生物似然方法使用自适应循环神经网络 内部状态控制自动机机器人
自然千年问题显示 20世纪最有影响力的发明 触发并持续 人类群爆数以十亿计的人将甚至不存在没有它
机器人群爆在少数国家最显见, 在那里人停止并可能最终超过它, 一旦认知机器人不用再硬接线而自学
-
-
何必来TUM
- 它是自动化机器人领域领先者,拥有许多独特和昂贵机器人,并与慕尼黑宝马公司和西门子公司等行业领先者建立强连通14位诺贝尔奖获得者(2005年最新一位)与慕尼黑相关联,其中4位与TUM相关联FOCUS调查(2004年9月20日)在德国大学中排名TUM前列慕尼黑LMUTUM和LMU均获选为三所德国Elite大学中的二所,这是所有德文频道的黄金时段新闻
-
为何来慕尼黑
- 并持续被选为德国最有吸引力的城市多文化趣味、十万名学生、世界最大节日(Oktoberfest)、世界最老和最大技术博物馆、高清巴伐利亚环湖、河流、山坡、草坪、自行车道、城堡和啤酒花园等邻近主要滑雪区Schmidhuber目击世界,并称没有比慕尼黑和阿尔卑斯山之间的山前土地更美丽的区域(他偏向-他生于慕尼黑)
-
何必来德国
- 何必来德国It is a fine place for scientists and inventors, with a long tradition of fundamental breakthroughs that define today's world, including Western bookprint, the calculator, binary arithmetics & calculus,, watches & other small machines, math a la Gauss, the second industrial revolution based on the combustion engine & the car & the first practical dynamo & electric locomotion, the germ theory of disease, the modern research university, general relativity, quantum physics, population explosion, the transistor, the computer, controlled heavy flight, the helicopter, the jetplane, cruise missiles, uranium fission, X-rays, and innumerable others.
统计操作器
![]() 统计机器人应用众所周知的统计技巧和概率理论(以前计算机视觉中已广泛使用)处理机器人问题典型方法包括卡尔曼滤波器、EM网、贝叶斯网络、粒子滤波器等机器人对当前状态的信念是概率密度函数依据新感官输入法和行为效果前概率模型持续更新信念
统计机器人应用众所周知的统计技巧和概率理论(以前计算机视觉中已广泛使用)处理机器人问题典型方法包括卡尔曼滤波器、EM网、贝叶斯网络、粒子滤波器等机器人对当前状态的信念是概率密度函数依据新感官输入法和行为效果前概率模型持续更新信念
机器人汽车先锋Ernst Dickmanns(1980s和90s)使用卡尔曼滤波处理自主飞行器不确定传感器读数
自1990年左右以来,在机器人定位和地图搭建领域,许多工作侧重于机器人定位和地图搭建,由Durant-Wite集团(Kalman过滤器/同步定位和地图搭建SLAM)以及Smith等创举启动
产品编程方法
引用指点定位(老化但非常相似视觉方法,等量目标即对象跟踪)。建立机器人学习复杂动作序列解决未知环境赋值问题(定位只是其中一部分)
越来越多的机器学习研究者正逐渐意识到事实,即存在通用贝叶斯理论最优方法实现这一点,至少如果我们忽略计算时间时段的话。基础是所罗门夫通用概率分布混合M假设世界对机器人动作响应的概率可计算(大家都假设),机器人可能预测未来感知输入并用M代替实然未知分布根據赫特最近定理(SchmidhuberSNF20-61847授标), 机器人真的可以最优地行动, 选择那些动作序列,可能称之为不可击败终极统计方法机器人-它展示出可能的极限-
复元
- CoteSys立体标注高山感知性泰城Chnical语言sys系统电信机如自主飞行器、人形机器人和机器人工厂Our CoteSys研究题目包括
开工人工好奇dLR人工手
二叉行为进化AM180cm双飞
3级视觉注意力和不受监督学习序列学习适应性移动机器人和机器人汽车
4级安全人与学习机器人交互
CoteSys综合TUM、LMU、UniBW、DLR、MPI在神经科学、自然科学、工程学、计算机科学以及人文学方面的专门知识这是2006年全国激烈竞赛中接受的少数建议之一
慕尼黑大学CoteSys伙伴TUM和LMU在德国大学中排名第一,据FOCUS和SPIEGEL最近调查14位诺贝尔奖获得者(2005年最新一集MPI)与慕尼黑相关联10/13/2006TUM和LMU被选为德国三所Elite大学中的二所,这是所有德文频道的黄金时段新闻
慕尼黑(München)是世界上最宜居之地之一(位居世界城市第二位,多文化趣味, 10万名学生,世界最大节日(Oktoberfest),世界最大技术博物馆,BMW和Siemens总部,cecificBavarian环绕湖、河流、山坡、草坪、自行车道、城堡和啤酒花园等邻近主要滑雪区许多人主张没有比慕尼黑和阿尔卑斯山之间的山前土地更美丽的区域
Germany is a fine place for scientists and inventors, with a long tradition of fundamental breakthroughs that define today's world, including Western bookprint, the calculator, calculus & the bit, small machines such as watches, math a la Gauss, the second industrial revolution based on the combustion engine & the car & cheap electricity & modern chemistry, the germ theory of disease, the modern research university, general relativity, quantum physics, the population explosion, the transistor, the computer, controlled heavy flight, the helicopter, the jetplane, uranium fission, missiles, X-rays, and innumerable others.20世纪大部分时间 德国高举诺贝尔奖 比任何其他国家都多或直到1965年,如果我们只考虑获奖国直至1975年,如果我们只考虑科学)仍是世界最大出口国也是世界第二大机器人制造者与用户,多德队成为机器人赛世界冠军
-
-
- CoteSys综合TUM、LMU、UniBW、DLR、MPI在神经科学、自然科学、工程学、计算机科学以及人文学方面的专门知识这是2006年全国激烈竞赛中接受的少数建议之一
-

- 自觉认知技术系统看到ligh
-

- CoteSys自动机车80年代UnibW制造世界首部机器人汽车,1995年它视觉引导奔驰机器人从慕尼黑回丹麦
-

- CoteSys认知工厂轮廓设计以评价CotesSys领域基础研究和应用研究
机器人汽车
- 师傅Schmidhuber高亮机器人汽车历史
1980年以前史前简单自驾驶车
1977年:一辆日本机械工程实验室车沿路达50米,时长达30公里/h
1980年代:传奇恩斯特德克曼斯(右派)和Univ集团慕尼黑UniBW搭建世界首部机器人汽车,使用百科全书视觉学,概率方法如卡尔曼滤波器和并行计算机
1987-1995年近10亿美元泛欧Prometheus项目,有史以来最大机器人汽车项目
上世纪90年代卡纳德索普神经网学习引导
1994年:VaMP自动机Dickmanns机器人
1995年:无手遍全美压缩机和制动器需要人工控制
1995年:UniBW慕尼黑快速奔驰机器人在高速公路上跳1000自动机里程-交通-无GPS
2005年:DARPA“Grand挑战”(限美队使用):无交通路由GPS驱动:课程预定义为2 935GPS点数(多至4GPS分数/街曲线)。难点类型预知
2006年:欧洲土地机器人测试:自动机越野车演示
2007年:新机器人汽车演示与挑战ELROB和DARPA
未来将带来什么2005年计算机比迪克曼斯时代大约快1000倍,而下一个十年将再加1000倍左右硬件进步是机器人控制进步的主要原因-软件进步似乎不那么重要,因为模式识别基本算法和概率推理在过去10年中没有发生根本变化,只有epsilon改进此或此汽车公司如BMW和DaimlerCrysler(公司拥有世界最大私人研究预算:截至2005年67亿美元)的许多代表对自驾驶车并不热心。为什么不呢?因为他们觉得完全自主汽车不一定适合客户基础的自我图像正因如此,他们目前研究的焦点比较小题,如驱动器辅助即便没有大型商业自驾驶车市场,自主车仍可发现重要的军事应用-比较美军研究实验室的工作(自1990年代中期以来)、通用动态机器人系统以及NIST系统架构Albus & team)
-













