- 提供配置文件
- 机器人头项目(2011年冬季学期启动)旨在探索人表情和面部情感,由肌肉控制并同时与计算机环境交互使用,使Servo电机使用模拟肌肉运动
产品组合
技术机器人头项目- Perlins
-

-
- 希伯来文翻译表示:计算机控制表达式机器人头
机器人头项目(2011年冬季学期启动)旨在探索人表情和面部情感,由肌肉控制并同时与计算机环境交互使用,使Servo电机使用模拟肌肉运动
机器人头项目有:
UG学生设计实践路伊赫什科
监督机器人实验室cheif工程师高比小海
项目于2012年3月成功完成
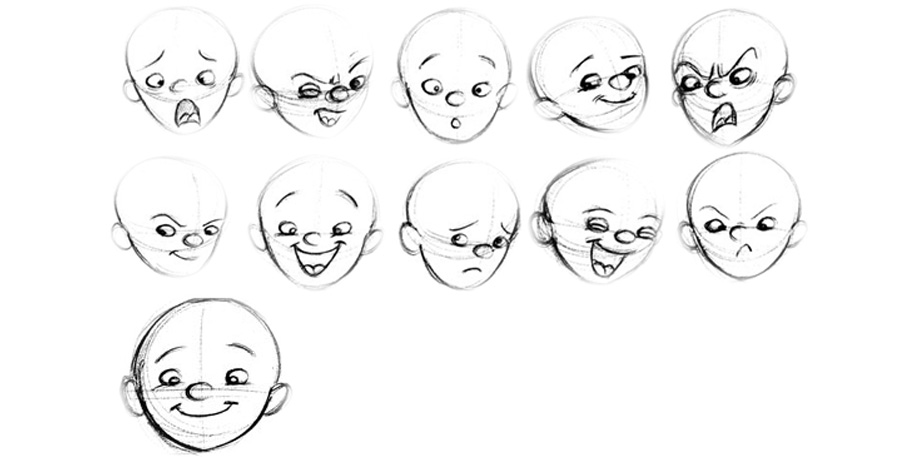
下图描述项目 :
想象下你用25Servo电机控制机器人头部,
机器人表达式
- 头装25Servo电机
开工眉眉
二叉眼膜
3级双眼
4级嘴唇
5级Mought和Jaw
6级颈部
全部servo引擎控件使用PWM脉冲
- 控制Servo电机使用微控制器
- 通信控制系统内外
- PWM-角转换
- 面性表达式算法
- 定时需求(PWM脉冲创建)
- 启动并定期测试
传输情感-微控制器从PC接收命令符,使用操作工具,我用C#写成,发送数据包(正确形式后描述),控制单+多servo引擎时移动0-180度(或-90+90度,取决于标定启动点)。
以下是全球大学其他类似项目略评
-

FLOBI-Beifielduniv
- 开工18DOF自由度AKAservo引擎
二叉包括视像摄像头
3级由6工程师组、研究人员组和教职员工组组成
memebers.
4级Bulit避免uncanny山谷
-

ICUB-Lisbonuniv,葡萄牙
- 一号.特殊子交互设计
二叉6DF
3级自2006年以来进展
百千元
-

WE4RII-edaunivjapan特效
- 开工22面DOF
功能性
二叉装有视像摄像头并带焦点控制
3级多级表达式算法
4级预算集-几百千元
5级开发与意大利ARTIS实验室合营
6级内含复杂机制
Perlins机器人
-
- 25DOF-25servo引擎遍历头部创建
- 硬件开发时有以下规格和洞察力:
- 开工二分电压调控器(一流至0.5A,ucontrace),(一Servo引擎7A)。
- 二叉外部晶体精度
- 3级Optocouplars缓冲低功耗和高功耗
- 4级导线计能保持高流耗
- 5级Flash可编程64插件微处理器51IGO端口(我用软件转成PWM输出件)。
- 提供极低预算(总成本)和由1雄心学生组成的工作队
- 固件多模块(测试模块、管理员模块、通信模块、表达式模块、PWM模块)。
- C#用户友好GUI工具加速后续项目并非常帮助展览
- 侧皮肤弹性多线性可替换Servo引擎二分数:21.6x13.97x20.3cm
- 项目创建时得到了CEOUSAxive帮助
- 自设计数据包协议PC微控制器(62字节/包控制25servo引擎)
下图显示投入项目硬件的大量工作
-
-








