- 提供配置文件
- Worcester理工学院机器人自主交互学习研究组侧重于开发交互式机器人和软件系统我们工作的目的是为日常生活者提供自定义自动机功能能力我们的研究横跨机器人学习领域、可调整自主性领域、众包领域、多机器人队列领域和人机器人交互领域
产品组合
研究
-
- 开发机器人与人合作对提高制造、医学、医疗、军事和消费者应用方面进步至关重要关键目标在于开发技术适应变化任务和用户需求
上头机器人自主交互学习Worcester理工学院研究组侧重于开发交互机器人和软件系统我们工作的目的是为日常生活者提供自定义自动机功能能力我们的研究横跨机器人学习领域、可调整自主性领域、众包领域、多机器人队列领域和人机器人交互领域
项目
-

机器人从演示学习
- 机器人从演示学习集中算法,使机器人从由人教师执行的演示中学习新任务策略详情见机器人示范学习调查当前工作包括对这一领域的领先算法进行第一次比较评价并开发新的多策略学习算法
- Halit Bener Suay和Sonia Chernova机器人从演示学习二算法比较eEE系统人机国际会议,2011年
- Halit Bener Suay和Sonia Chernova人文引导和状态空间规模对交互强化学习的影响iEE国际机器人和人际交互通信专题讨论会(RO-Man),2011年
-

RoboCup自主机器人赛
- RoboCup是一个国际竞赛,旨在通过开发自主足球机器人促进AI和机器人研究WPI标准平台联盟竞赛,要求所有团队使用 Aldebran Nao机器人机器人非遥控通过两架头部摄像头观察世界 并使用这些信息识别环境对象机器人使用无线网络相互通信并使用机载处理决定应采取的行动文章描述事件和WPI勇士队
-
开源机器人控制台界面
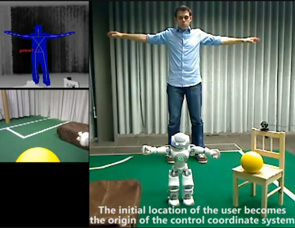
- ROS Nao-OpenNI包使用微软Kinect传感器为人形机器人提供手势控制视频显示使用代码控制 Aldebran Nao
上方视频显示使用代码控制 Aldebran Nao
-
人力代理传输
- 人力代理转移技术是一种政策学习技术,它综合转移学习、从示范和强化学习实现快速学习和复杂领域高性能使用这一技术,我们可以有效从人向代理传递知识,即使他们对状态有不同感知
- Matthew Taylor Halit Bener Suay和Sonia Chernova整合强化学习与人形异能力演示自主代理和多代理系统国际会议2011年台北台
- 马修E泰勒 Halit Bener苏艾和Sonia Chernova使用人类演示提高教程AAAI2011 Spring专题讨论会:帮助我帮助你:缩小人力协作空白,Palo Alto,CA,2011年
-
云启动器:利用常识计算实现儿童早期读写
- 向幼儿提供发展早期读写技能的机会对于他们在学校的成功学习成功和生活成功都很重要。项目重点是在平板计算机上创建新的交互读入门技术,通过使用面向成人参与者的定向讨论专题建议系统促进早期读写技巧和分享父子阅读云前导论者会聚集全社会阅读者对父子Diads交互和讨论并加通识库开发计算模型并用这些模型向父母提供环境敏感讨论题目建议,与幼儿分享阅读活动





