- 提供配置文件
- IntROLab研究实验室追求研究、开发、集成和使用机电和人工智能方法设计自主智能系统的目标研究活动包括移动机器人软件硬件设计、嵌入式系统自主代理器和即时评价实验研究注重实用性,面向克服挑战 制造机器人和智能系统 实用现实环境提高生活质量 并发现如何向机器提供智能应用领域包括服务机器人、全地形机器人、交互机器人、辅助机器人、远程保健机器人、汽车外科机器人
产品组合
微信
-
DEA系统
差分弹性启动器
-
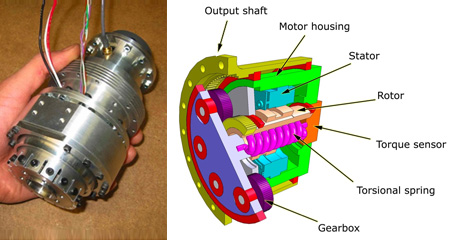
- 机能精确控制环境交互作用的安装从使用专门设计用于此目的的动画机开始为此,开发出一个新的高性能启动器集成设计,这些高性能启动器特别适应机器人机制设计使用机械差分为中心偏高阻塞传感器和偏低阻波元分解提供串联等益差分联动允许新的趣味设计实现可能性,特别是轮动器
-
解甲返乡
双差关系启动器
-
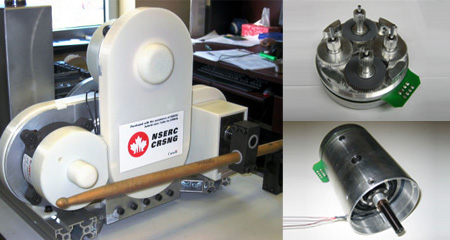
- 机器人系统越来越多地走出工厂,踏入充满未知物的动态世界,以安全多功能方式互动。依赖定位控件和僵硬触发器的传统激活机制往往在这一新背景下失效。多次尝试修改之方式包括加全套力姿势传感器并使用新控制算法,但在多数情况下自然高输出惯性和非线性传播如摩擦和回弹仍然相当累赘
拟议的激活机制处理许多这些限制DLA使用差分机制与两片磁制动器并发电磁电机配置允许DLA高带宽、极低惯性、极低摩擦和不逆冲电波源并可控制跟踪所期望交互动态长处包括安全强健性因极反推力和交互性多功能性较传统化背景中,驱动者低惯性、消除反冲和非线性下降允许提高加速度和更精确定位,从而提高生产率和质量
-

Azimut
全方向机器人平台带脚轨迹Wheels
-
- AZIMUT解决多项机制供在同一机器人平台上运动的挑战AZIMUT有四种独立坐标线,可以是轮子(如上所示)、腿或轨迹或组合通过改变表达方向,AZIMUT还能够在不改变取向的情况下侧向移动,使其全向化。所有这些功能都为机器人提供移动紧密区的能力AZIMUT设计为高模块化化化,例如将启动器放入电文中,这样轮子很容易由全地形操作的行道连接取而代之。通过增加垂直悬浮并使用弹性电动器对AZIMUT电路标向提高平台的稳定性和一致性弹性元素置入激活机制并使用传感器测量变形,允许感知并控制驱动器端的托盘提高机器人平面平面平面平面平面平面机电模块,如所有配置都使用轮动程序使用分布式处理架构,多微控件通过共享数据总线通信AZIMUT设计提供丰富的框架 创建各种机器人供室内室外使用
-

CRI-Roball球机器人
Tito-机器人与自闭症儿童交互
-
- 考虑造机器人可居居环境 装满各种屏障 需要特殊运动能力运动机器人小步者玩具必须环游其他玩具和对象并能够维系粗糙交互环境封装机器人球体并使用球体使机器人环游环境是一个解决办法机器人球形能畅通地穿透屏障 并创建简单而有吸引力的与学步者交互机器人封装壳帮助保护易损电子Roball第二原型专门开发为玩具并使用定量定性评价技术研究机器人和小步人之间的交互作用观察确认Roball物理构造和运动动态产生兴趣并产生各种交互环境受环境环境环境及儿童个性影响Roball目前用于观察如何从机上导航传感器直接感知子交互性
缺陷和工具
-
RTAB地图
实时外观映射
-
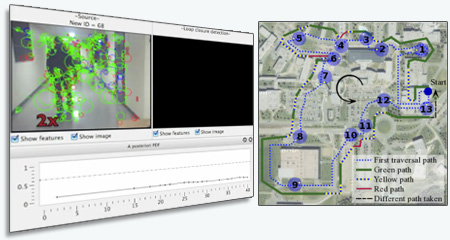
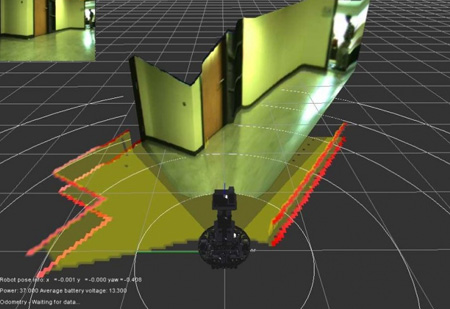
- 循环闭合检测是查找SLAM当前访问点和前访问点匹配过程随时间推移,处理新观察所需时间随内部地图大小增加,可能影响实时处理RTAB-Map是大规模和长期SLAM新式实时环闭检测法方法基础是高效存储管理,将每次新观察的计算时间保留在固定时间段内,从而尊重实时长期操作限值结果显示方法使用自定义数据集和四套标准数据集的适配性
-
似然性
声音源局部化、分离处理
-
- 人工听力系统使机器人有能力定位并跟踪声音,并有可能分离同时声音源并识别同时语音我们证明使用数组麦克风实现这些能力是可能的,不试图模仿人听系统声源定位跟踪算法使用引导波束定位源,然后用多源粒子滤波跟踪源同步声源分离使用几何源分离算法变量实现,并加多源后过滤器进一步减少噪声、干扰和反射语音识别对分离源直接或使用缺失特征理论估计语音特征可靠性所得结果显示,可同时跟踪四种声源,甚至在噪声回荡环境也是如此并显示机器人实时控制声源声源分离法可实现信号对噪比13.7dB改善,而3位发言者在场时单声波比在上述条件中,系统显示数字识别精度达80%以上,比多数人类听众在评价中只识别其中源码之一时能得到的精度高所有这些新能力都使人类有可能更自然地与移动机器人在现实生活中交互
开源实现程序称多耳并存http://manyears.sourceforge.net
-
美莉亚
移动自主机器人综合环境
-
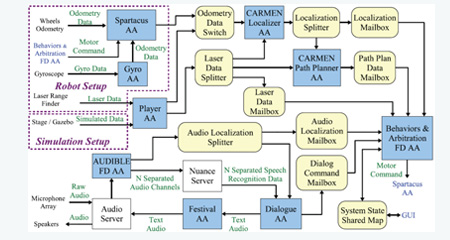
- MARIE设计工具移动自主机器人应用,旨在促进多异软件元集成这是一种基于分布式模型的灵活工具,允许使用一台或多台联网机、架构和平台实现应用由柳树停车场ROS取而代之
注:MRIE不再维护
-
FlookDistri
图形编程环境机器人游戏
-
- FlookDestreter免费数据流开发环境可合并小可复用构件构建复杂应用在某些方面,它相似Siminglink和LabView,但几乎不是两者的克隆FlookDesigner特征adGUI并带视觉调试器FlookDestreter可快速原型工具使用,但仍可用于实时应用构建,如音效处理FlookDestreter并非翻译语言,可快速化C++中写出并特征插件机制允许插件/工具箱易增
机器人Flow基于FlorDesigner项目使用移动机器人FlookDestreter项目提供可视化编程接口,通过使用图形探针实时调试帮助人们更好地可视化并理解机器人控制循环、传感器、动画机实情注:机器人Flow不再维护
-
OpenECosys系统
-
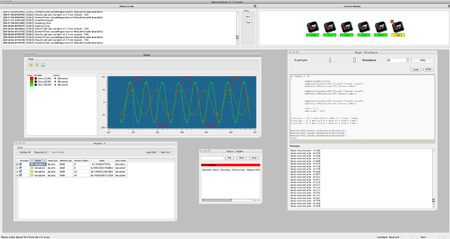
- 开嵌入式计算系统项目包括免费提供开源硬件和软件实现嵌入式计算设备初始jet启动自Sherbrooke大学IntRolab-智能/交互/集成/跨学科机器人实验室随时间推移,IntRolab开发多嵌入模块供自身移动机器人平台使用所有模块都通过共享CAN(控制区网络)总线连接成分布式传感器和启动器网络,用于高级平台,如AZIMUT3机器人嵌入式系统大都以微芯片微控制器为基础,这些微控制器廉价、强强多功能性强软件工具,如NetworkViewer开发后允许监控分布式网络多内部变量,以便利开发任何应用
智能决策
-
自主机器人
社会智能自主机器人
-
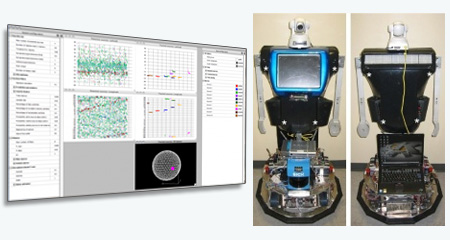
- 目标是设计最先进机器人 高集成能力感知、动作、推理和交互 自然环境操作多研究项目整合同机器人平台
小强尼人形机器人
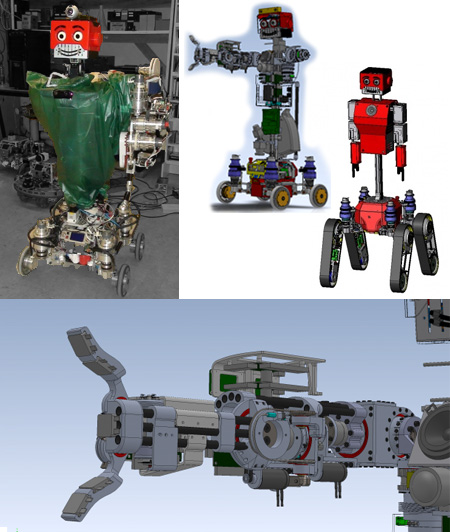
强尼小机器人基于多项目(ADE、AUDIBLE、AZIMUT、HBBA)机器人有不同的传感器 配置主要人的存在检测例举使用
激光测距器(Hokuyo UTM-30LX)对180度人民腿
微软Kinect定位3D到机器人前四人
头顶摄像头检测面孔
8个麦克风阵列定位声源
强尼小分队也可以以不同方式与人交互作用,包括:
语音
面性表达式
头部运动
臂手势
基础移动性
-
HBBA
混合行为架构
-
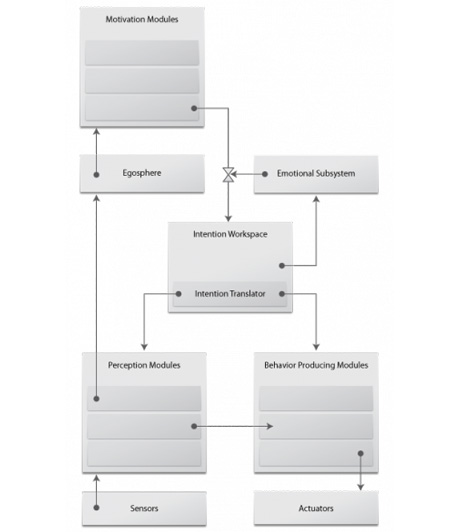
- 新建混合行为架构整合自主移动机器人控制架构的最新研究,并进化动能行为架构逻辑演化当前它赋予我们人形机器人强尼0的脑力
决策结构仍然分布甚广运动模块为系统提供高层次期望意图工作空间起黑板作用-分享空间促动模块发布他们的欲望意向翻译者接受这些欲望 并翻译成实战意图 受控机器人表示动因模块松散地与实机相联化 使它们在结构的不同实例间可移植选择注意力机制翻译者 尽量利用平台有限资源 选择相竞感知行为策略Eglocal测量感知事件并构建更容易控式抽取由硬件提供的每一感知输入情感子系统根据机器人模拟情绪调节需求强度,这与当前意图实现程度不同
当前实施程序集可复用ROS包,大都写C++
-

DCD测试
协同驾驶系统
-
- 最终实现自动化车辆排操作时,必须研究每一车辆必须拥有的信息和与谁通信,以便在所有可能条件下安全高效地操作。通过模拟排使用一组移动机器人,我们展示使用分布式协调策略操作的可行性(如进出和从意外恢复)。协调策略研究范围从不通信到车辆间单向或双向交换不等,再到领先车辆完全集中决策不等。与其假设排长或所有车辆全局监控事物,倒不如假设只涉及特定动作的车辆,在当地排间分配决策使用有限方向感知的机器人实验使用视觉和屏障避免感知结果确认协调策略在不同条件下的可行性,并用各种传递信息补偿感知限制
互连互连
-
TR界面
Egocent和Exocent远程操作
-
- 跟踪Telerobot原创项目后,我们开始开发3D新界面远程操作导航任务
界面合并实时
SLAM搭建二维环境地图
激光二维视频馈送
三维投影由立体摄像头造色点云
CAD机器人3D模型
用户可用此接口移动虚拟相机环绕受控机器人无缝从自居向异居视图转换和现代三维三维视频游戏一样,用户能够设置最适配手头任务的观点,像自上而下浏览紧接空间或直通视图与人通信
未来工作
新的ROS兼容开源实现程序,将利用Kinect等现代传感器
-
远程创伤
电信急救室
-
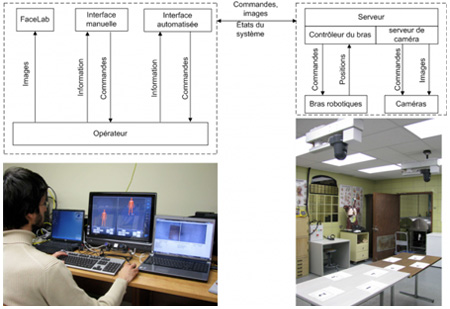
- 目的:弥补急救专家短缺并保持偏远地区医疗质量
方法:开发并验证实时教程概念 使用机器人化摄像系统开发最后原型评价其在受控条件下外科程序的影响
结果:初步结果显示:i)系统允许远程从业者轻松查看所有紧急手术程序
和二)专家教非专家使用适当的运动语句执行外科程序结论:系统可点名提供帮助,提高外科外科外科医生缺位区居民创伤医学服务水平系统还可以通过远程支持外科程序来降低医疗费用,手术程序用于稳定不稳定多重病人到达外伤室时。
-

Telerobot
移动机器人家电讯
-
- 远程医疗辅助家庭技术是减少医疗系统负载、缩短住院时间和提高生活质量的一个极有希望的途径。远程操作移动机器人可成为健康应用的有益工具然而,与这些系统有关的设计问题范围广,多半未探索(例如居家运动和导航、远程交互作用和受体可接受性、临床需求评价及其融入保健信息系统)。设计安全有效机器人系统实现家用远程帮助需要考虑新用户在与病人交互时远程浏览家用机器人的复杂性
采用跨学科探索设计方法开发远程现场辅助移动机器人帮助老年人使用机器人的初步研究、焦点组和访谈使我们能获取设计名为Telerobot的新移动机器人系统的初步规范Telerobot运动机制提高移动分布式帮助向用户提供稳定的视频馈送控制系统安全远程操作由10名康复专业人员参与的研究确认系统可使用家庭环境新手远程操作器使用远程操作策略分析显示,在家庭环境里,远程操作接口向用户提供机器人周围对象的视觉反馈、与机器人相对距离和机器人环境大小等至关重要增强用户界面增强运算符环境感知进行这些实验的目的是开发出完全、高效和可自用远程辅助移动机器人系统
-
CRI系统
生态学儿童机器人交互
-
- 考虑造机器人可居居环境 装满各种屏障 需要特殊运动能力运动机器人小步者玩具必须环游其他玩具和对象并能够维系粗糙交互环境封装机器人球体并使用球体使机器人环游环境是一个解决办法机器人球形能畅通地穿透屏障 并创建简单而有吸引力的与学步者交互机器人封装壳帮助保护易损电子Roball第二原型专门开发为玩具并使用定量定性评价技术研究机器人和小步人之间的交互作用观察确认Roball物理构造和运动动态产生兴趣并产生各种交互环境受环境环境环境及儿童个性影响Roball目前用于观察如何从机上导航传感器直接感知子交互性
















