- 提供配置文件
- 我们的目标是对机器人基本问题进行突破性研究,以便使自主移动操纵者能够执行这些任务和其他挑战性任务。我们的重点将不仅放在令人振奋的新研究上,而且还放在开发强健和可广泛应用的新工具与软件上,供其他研究人员使用。
产品组合
项目
-
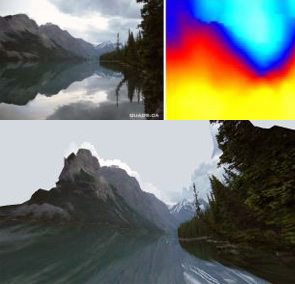
make3D:单图像深度感知
-
- 学习算法预测深度并推三维模型,仅提供单静态图像应用包括从用户照片中生成沉浸式三维经验,提高立体视觉性能,从几张图像中创建大规模模型,机器人导航等数万用户将单片转换为3D模型
-
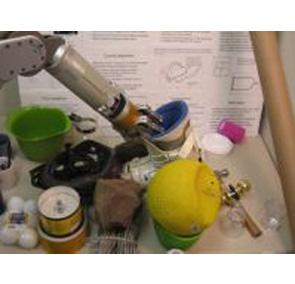
个人机器人学习机器人操作
-
- 学习算法预测机器人抓取,即使是机器人前所未见类型对象应用到任务中,例如从洗碗机卸下项目,清理布局表,开新门等
-

整体场景理解:组合模型黑盒
-
- 整体场景理解需要同时解决数项任务,包括对象检测、场景分类、有意义的区域标签和三维重建开发一种学习方法 夫妇这些子任务 提高各自性能
-

可视导航:微型航空飞行器
-
- 单目深度感知加固学习技巧高速驱动非结构化环境小弧车并自主使用单机摄像头飞送室内直升机/水警
-

STAIR:开新门
-
- 机器人实际部署自办公环境时,应能够操纵环境获取新空间介绍学习算法实现, 从而使机器人成为第一个能够开机或开机到新楼任何地方游览的机器人, 甚至是它以前从未见过的门或电梯
-

STAIR光近感应器
-
- 新光学近距离传感器提高抓取安装在指针上的传感器允许预触摸姿势估计,并因此允许在线抓取调整初始抓取点而无需过早对象接触或重裁策略
-

祖那维
-
- 我们开发算法通过添加纹理自动修改视频算法执行强效跟踪 排除推理 颜色校正 令纹理看原创场景
-

可视导航:高速屏障避免
-
- 单目深度感知加固学习技巧高速驱动非结构化环境小弧车
-

make3D扩展:稀疏视图大尺度模型
-
- 创建大环境三维模型,只提供少量(可能)非重叠图像技术整合运动结构技术与Make3D单图像深度感知算法
-
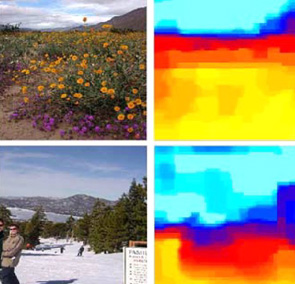
使用单目提示改善立体
-
- 立体视觉受两个摄像头间基距离的限制深度估计偏差大时往往不准确单目信号大致对齐并互为补充 深度信息类型单目提示入立体信号获取比单机都可能的深度估计高得多的方法











