- 提供配置文件
- Vrije大学Brussel机械工程部多机机组于1990年开始计算机辅助分析硬软机械系统的研究活动其主要研究侧重于运动和动态模拟、开发使用新驱动器以及控制机械系统
产品组合
Probo-智能拥抱机器人
- Probo是一个智能拥抱机器人,开发成研究平台研究认知人机器人交互作用,并特别关注儿童机器人Probo设计成社会接口,提供自然交互作用,同时使用人式社会提示和通信模式机器人完全激活头20度自由,能显示面部表达式显着特征是移动后备箱和软可拥抱夹克方便用户机器人界面使运算符控制机器人
-
-
-
Lucy双脚漫步机器人
- 项目的目标是创建轻量分机,以动态稳定方式行走双片构造人文化聚焦下行段,由两条直径组成机器人重约30公斤 高150cm机器人受限只在人造平面移动, 因为它是单维联结, 由对阵充气人工骨架组成肌肉是轻量充气驱动器,低压工作,可直接并发,不设复杂适配机制演动算法中将利用这些演动器可变被动行为
设计中关键思想之一是模块性,结果每个结构元件以及机械、电子和低级控制软件元件都产生近似相同的配置联合设计本身容易改变激活器特征,创建弹性实验平台
-
-
-
充气人工肌肉
- 充气人工肌肉本质上是一种膜,在膨胀时会自动扩展并散装,同时沿纵向轴生成高拉力开发出不同的设计最有名的是McKibben肌肉(例如Schedow机器人公司空气肌肉)。脉冲内含橡皮管,当膨胀时会扩展,同时环绕网状传输紧张Hysteresis由于网状和橡皮管之间的干摩擦使得控制这种装置相当复杂典型的肌肉压力阈值 任何动作发生前新设计的主要目标是避免摩擦和歇斯底里,从而使控制更容易同时避免阈值实现这一目的的方法是将膜整理成可松开拉伸压力时加热时可松开拉伸的折叠膜硬纵向纤维移位
-
-
-
软臂
- 重复人工处理重负载常见并常引起低背部失序这可能对生活质量产生重大影响并造成严重经济代价。操纵器是机器人系统 设计避免这些问题他们帮助人们执行重任务
商业操作程序大都使用反重量限制处理特定质量负载另一些则从电水作用通常这使他们重重复杂费用高
PPAM动作器的使用使我们能够解决这些问题并开发操纵器,将工效学、运算符安全性、低成本、低重量易操作性结合起来
我们研究的目标是开发概念验证操纵器,用于直接接触操作器,无代价力或托盘传感器,不通过控制元素(如摇杆)与用户交互系统行为举止如下:运算符想移负载时,heshe开始移位仿佛没有操纵符通过测量肌肉计压系统可估计运算符应用力并帮助他实现期望负载运动最理想的是 移动30公斤负载 感觉像移动3公斤负载运算符和负载之间的直接交互作用(无中间控制工具)允许非常精确定位
-
-
-
AMPfoot
- 带经典假肢行走非常困难和耗能,就像休赫赫尔说道“像用闭合滑雪靴行走一样”。出自我们技术兼容演算器 双步机器人像双路Lucy 我们开发AMP脚被动假肢(行走技巧不提供能量),但能量存储并释放,尽量模仿正常脚踝
-
-
ACCEPA:机械可调适均匀定位启动器
- 除开发并实现充气人工骨架外,我们研究组开发出第二个可适配开关MACCEPA(机械可调整守法和可控均衡定位动画器)直截了当并易建轮动画器,可与均衡定位分离控制守法每种参数都由位置控件servo电机设置再者,托克线性函数即守法度和均衡位置与实际位置角间之函数推理器可视之为完全适配推理弹簧, 电机搭建推理弹簧的僵硬性, 和电机搭建平衡位置自此驱动器有泉水后它可以存储释放能量这使该启动器完全适合动态行进和人与机器人接口
-
-
-
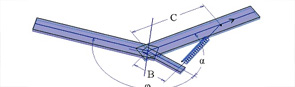
- 可见三体环绕一个旋转轴可视化概念图1左体可视为上段,右机为下段和旋转轴,穿透膝关节环转轴图3显示拉杆臂分线为小体弹簧连接上拉杆臂固定点与右体固定点对端线连接机制




















