硬件搭建
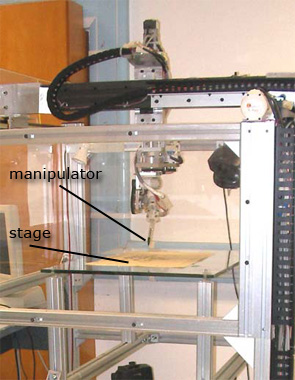
REAP是一个机器人平台,配有5-DOF操作器(图1),由x-y-z轴翻译机制组成,持有机器人抓器并附加z轴旋转DOF第五DOF由刷笔倾斜提供5DFs联合提供智能仿真手手手腕运动执行中文刷子DOF都独立指令,消除与多机器人系统关联的运动学问题输入命令通过pID类型控制器执行
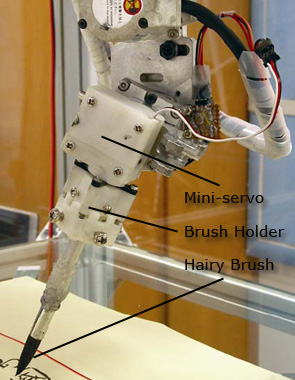
图2显示操作器上附加机制,内装servomot和刷控件沿轴锁转刷笔机制无法改善刷笔工作DFs,但引轴刷旋转运动将允许从刷子移出过量墨水并在需要时理直发,两者都对中国刷子手艺至关重要。
显示能力
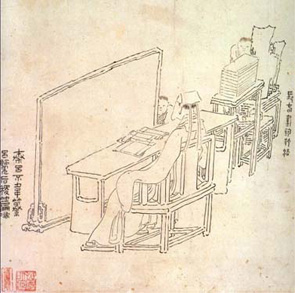
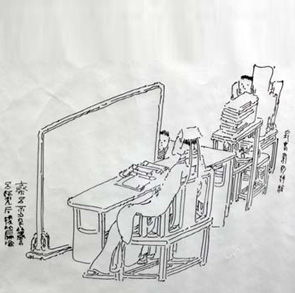
到目前为止,REAP能够自动线中划取适当图像输入系统还能够执行视觉迭代绘图表示当前执行图与原图像比较 并推断出不完美比较所得信息将应用到下次执行中提高质量图3显示REAP执行线图并比较原创全中风文法系统能分解给定字符进单划接并生成复制给定字符所需命令图4、图5和图6显示REAP完成的三项工程原创显示比较
开发算法目前不区分书法执行和绘画执行正因如此,中国书法执行错误顺序执行中风元素,中文认为重要的东西今后工作将努力改善这方面的状况。并正在搭建程序, 以便能邀请中国笔画家和画家来实验室 实时记录执行时他们的刷子运动数据库收集后将服务于未来分析画家各种风格的研究