自主移动机器人是经典无轨电车的现代子代多亏高级传感器技术智能算法,他们可以在所有环境中自由移动,动态避免人阻并独立到达目的地
应用领域千差万别,范围从简单动态材料传输到传感器完全自动定位以及与测量测试设备交互研究中,它们作为AI研究的演示者,作为测试平台制定新路径和定位方法,或作为下一代机器人开发者实践设备




小型敏捷机器人处理工业应用中物质流和内部学自动充电站加载系统可用
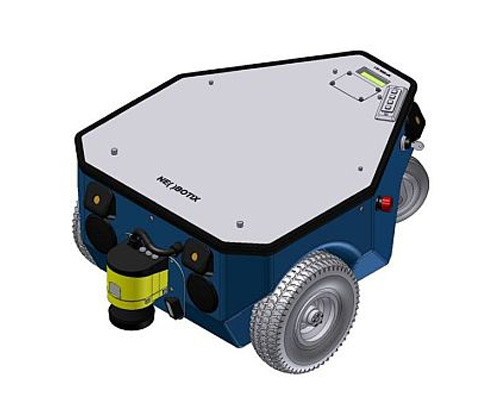
移动机器人MP-400开发出许多创新思想,专供行业日常使用
其主要任务是内部弹性材料运输敏捷小机器人可搭建无法用楼面传输器或经典无人运输系统实现的路径
MP-400也可以用于远大应用无论是移动操纵机集成机器人臂机机机机机机机机机机机机机机或实验系统机师机师机组研究机件机件机件机,MP-400主机几乎全数任务机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机件机全
有效载荷 :最高150公斤
尺寸(毫米):590x559x411
速度 :5m/s
带综合机器人臂的移动机器人通常被称为移动操纵器举例说,它们用于服务机器人研究项目或护理应用
移动操纵器在工业应用中也越来越受欢迎任务范围从要求处理任务到不寻常和独特任务不等,无法用传统系统解决

移动操作器用于工业处理应用和研究紧凑性对称系统
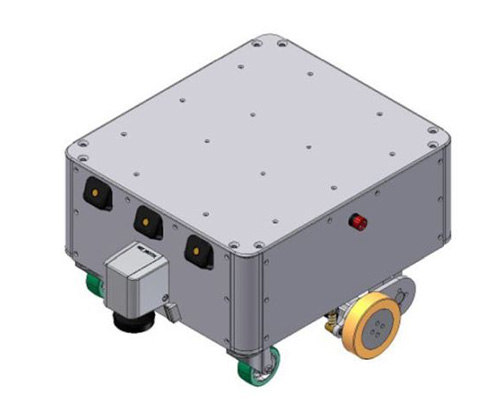
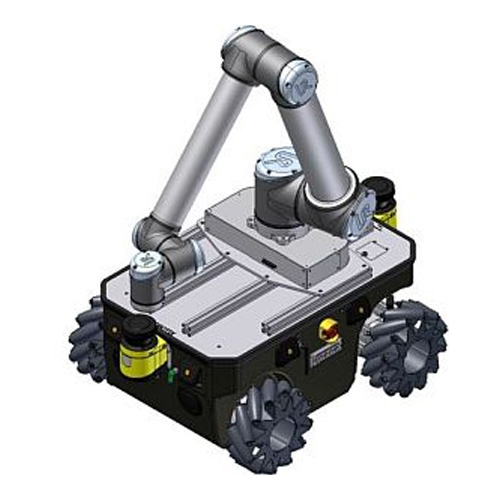
移动操纵器MM-400组合基础平台MP-400和轻臂这使得MM-400理想应用极有限空间,其他平台无法再操作
Pilz PRBT组合重要安全功能并全力支持ROS,这是一个广受欢迎的机器人臂
有效载荷 :60kg/110k
有效装入机制:6kg
机器大全Pilz PRBT
尺寸(毫米):590x559x411
速度 :5m/s
移动操作器用于工业处理应用和研究高载荷和松散性能 高成本-性能比
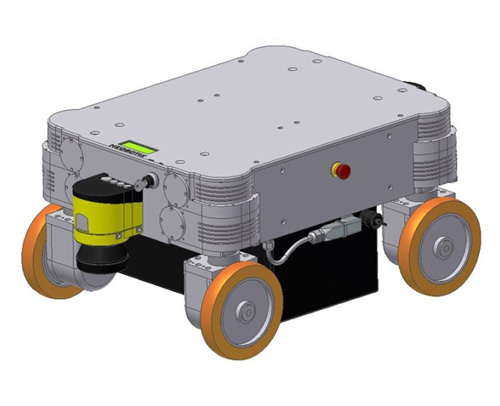
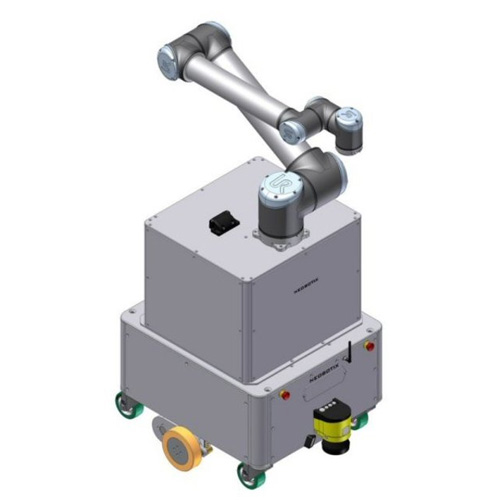
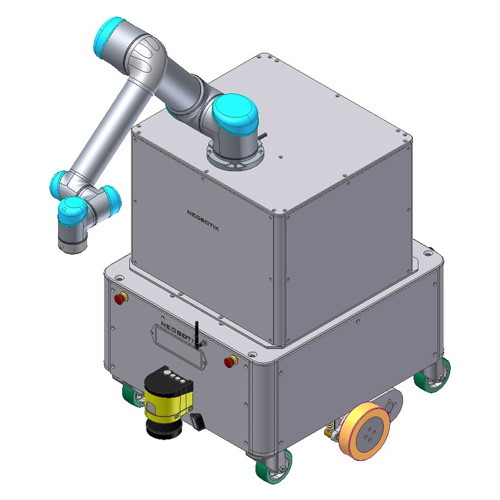
移动操纵器MM-700从通用机器人等轻量臂归并移动机器人MP-700高载荷和稳定基础平台MP-700也使得很容易整合其他武器成为可能,如回想机器人学Baxter或KUKAiwai
mPO-700拥有所有Neobotix机器人最大电池容量,甚至可自主工作,全天不中断使用集成机器人臂平台和臂可受ROS控制
有效载荷 :180kg
有效装入机制:10kg
机器大全通用机器人Schunk
尺寸(毫米):898x695x852(LxWxH)
速度 :<1.0m/s

机器人操作系统更了解ROS,是各种自主机器人开源框架庞大的机器人开发者国际圈正努力改善框架本身并不断创建新功能、包和模块
ROS发展成为最常用控制自主机器人标准ROS从大学和研究所工具启动后, 已经在工业应用中打上标记

ROS依靠开发者社区内持续互动和思想交流而蓬勃发展框架核心概念是易用新版和改良版或定制版替换现有节点其中包括传感器接口和装置驱动器等基础特征,但也包括3D映射或动态路径规划等高级特征
设备制造者、系统集成者、研究人员和私有开发者都为ROS出力创建并维护大量工具与可能性,免费提供开源包供他人使用多数开发者使用此现有基础, 帮助保存宝贵的时间并专注于创意工作其结果供其他ROS用户使用ROS总能更新 并最佳获取方式 最新前沿算法

ROS是所有Neobotix产品核心组件完全移动机器人和分离组件都可用ROS
所有机器人都配有ROS基本安装并准备使用其中包括所有驱动器和硬件相关节点以及可靠包以绘制环境地图、定位和路径规划
可选组件,像广受欢迎的USBOard,可无缝整合到机器人中也可以独立操作或整合到您的项目中
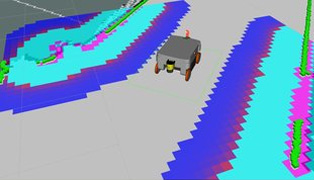
可使用广易用模拟包起草项目并开发新软件模块并脱机测试
详细3D机器人模型外,这些包中还包含现实世界和预配置易调整导航搭建可创建基于模拟传感器输出的地图并让虚拟机器人探索环境
这将使你深入了解机器人及其能力并实验自身修改
ROS开发工作室提供最便捷方法测试ROS下移动机器人并初步了解其潜力
客房帐号完全适合初始测试并提供多项优异条件