




挑战
Y-Cut表示绵羊处理线前2切绵羊从链条上悬起双腿并切下前腿内部以中间相遇
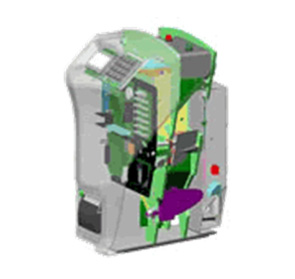
智能Y-Cuter
查看Y-Cuter工具头通过点击上链路操作设计工程师用此模拟检验工具头所有部件是如何操作的,

排气优异
使用压缩气分离毛片和尸体法
机器
成功同时执行双脚自动排气
关键成份是注射针,它能双重作用渗透和注入毒气
机器性能高度依赖注入针的确切位置和方向,针由3DOF操作器对每条腿控制
内置打扫系统每次注入后都断裂刀片


挑战
机器

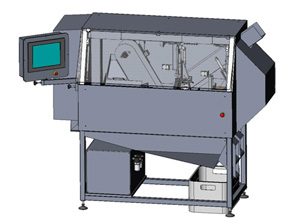
研究场景
兴趣在于处理非硬性对象如果实,并有可变大小、形状、固态和纹理
设计机器人抓网工具 从边上获取果实
深度图像从立体图像对校准相机处理用切片分析算法识别单个对象
取取每个对象的姿势取自特定深度的浮云分析
候选选择点识别最佳选择和坐标计算并寄送机器人
机器人取水果转送送点


研究
工程使用移动机器人配有声纳传感器
初始机器人指令计算环境认知映射机器人不是认知代理,它无法按定义计算认知映射
近似地图 创建本地空间网络 每一种都粗略估计本地空间 并有已知退出点
结果
从实验中,机器人计算出访问点粗略表示法
机器人使用距离定位信息寻回
开发过程为认知映射性质提供有趣洞察力,鼓励我们使用移动机器人在未来绘制认知映射,而不是机器人映射中常用

不同的动物有不同的感知能力身处不同环境并面临独特挑战并进化成不同的导航策略
信息的两个关键项所有动物都固有,对导航至关重要:距离向导
高层次动物可能编码 甚至可能偏爱更丰富信息 增强动物认知图距离定位总算成认知映射核心过程
沙漠蚂蚁Catalyphisfortis可达100米远自巢觅食但它仍然能回巢更令人印象深刻的是,它能够确定最短路线回家

