- 提供配置文件
- LIRA-Lab综合先进机器人实验室在热诺瓦大学通信、计算机和系统科学系运行
主体研究主题为人工视觉和感官运动器协调从计算神经科学角度
产品组合
机器人宿
-

-
- 机器人Cub项目历时5年,由欧盟委员会通过单元E5“识别系统、交互和机器人学.我们的主要目标是研究认知性 通过实现人形机器人 大小为3.5岁孩子iCub开放项目以多种不同方式展开:公开分发平台,开发软件开源,并开放新伙伴和世界范围协作
机器人Cub是一个成功故事 引导财团历时4年 持续深入合作
从神经生理学到工程开发创新技术(iCub的每个组件都设计或定制)和前沿科学
技术公开分发一个重要的组件致力于支持iCub公开性,在意大利理工学院热那亚建立国际研究训练设施除更新iCub设计外,它至少维护3个完整的iCubs,允许世界各地的科学家先用iCub实验研究研究培训设施还将为科学家和学生提供建设、使用和发展iCub认知能力培训课程方案
帮助研究者获取iCub拷贝,机器人Cub项目启动公开调用六大成功建议者免费获全icubkit这些机器人将供欧洲研究中心使用更多机器人将建为ISTFP7项目的一部分,我们正在商谈美日数项请求iCub中间件和一般部分技术目前甚至在原型机器人领域外世界使用活跃用户社区正积极促进第一个完全开源人形设计
我是谁
人形机器人iCub.手多关节并学习技巧操作对象脑部和眼部完全表达 我可以引导注意力处理我喜欢的事情以耳听用fngertips并有平衡感此刻我可以做简单的事情, 但我的人类朋友每天教给我和我的兄弟一些新事物(我们正在成为国际家庭!
-
-
-
-
-
-
-
babybot项目
-
-
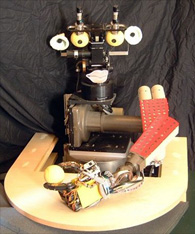
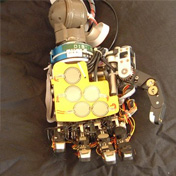
- 上头比比博特LIRA-Lab人形机器人最新版本有十八度自由分布头手自定义实验臂是一个脱机小PUMA操作器并安装在旋转托盘上babybot感知系统由两组摄像头组成,两组有空间易解性,两组麦克风安装在外部耳内,三组陀螺仪模拟人类前置系统,每组定位编码器,手腕触摸器/叉感应器和指针和手掌感应器
上图所见的是Babybot最新实现过程,这个项目始于1996年LIRA-Lab硬件本身经过多次修改,所以除了PUMA臂外,第Bi
科学类目标化即发现机制 通过搭建实现脑功能物理模型神经控制认知结构物理模型嵌入人工系统 自由交互环境同时,我们的方法来源于研究人感官和认知开发目的是调查开发方法建设智能系统可提供人类行为方面新洞察力和复杂人工系统实施新工具
例子中我们实施的行为包括(但并不仅仅是)控制眼运动,如边缘状态、secades和前立布洛-ocle反射我们一直在研究各种感官模式整合问题,例如前置信号和视觉信号或声学视觉感知实现行为工具 与外部环境发生物理交互 发现对象属性
-
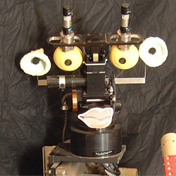
头部
-
-
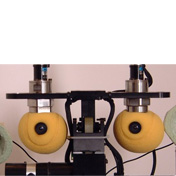
双眼
-
-

欧尔斯
-
-
机器大全
-
-
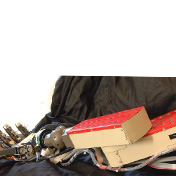
手势
-
空间变量CMOSRetina
-
-
- SVAVISCA内部实现该传感器,SVAVISCA项目由欧洲联盟在ESPRIT长期研究倡议下资助
图片基互动设备有效互通
目标
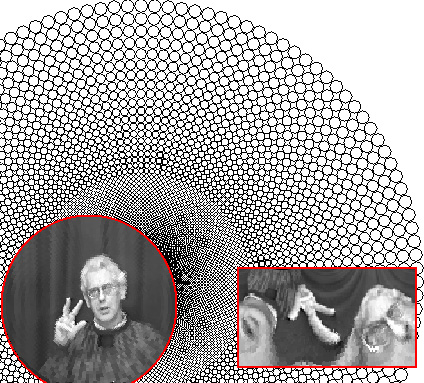
IBIDEM的主要目标是开发视频手机供听障者读嘴语并提供基于新式空间可视传感器并使用标准电话线远程监控能力长途通信社会实用正成为日常生活中日益重要的因素听力缺陷确实使许多人因bivios原因无法使用正常语音电话解决听障者问题的方法是使用视频手机当前可用视频手机标准电话线并不符合读嘴语必备的动态需求。空间分辨率太小为促进读取、签名和指法拼写,IBIDEM将开发视频手机,基础是新颖视觉传感器类型,与时空域中人类视网膜分辨率匹配(视像或空间变量传感器)。IBIDEM财团成员已经拥有欧洲和美国专利,用于开发像素设备原型视觉传感器几何与人视网膜相似,中心部分高分辨率和外围视觉场低分辨率,图中显示取像像素数下降(允许标准电话线传输率提高)而不损及图像视觉外观,从图中可以看到这一点。
图在后台显示空间变量传感器布局,64异常度中各有128光受体分辨率共像素8192圆形图像表示此传感器在“finger拼写”(即显示图像)期间输出值,右侧显示面矩形图像(扩大)日志极表示值(即接收/传输图像)则表示值
IBIDEM的第二个目标是使用同一种设备远程监控健康状况系统可用图像形式获取客户状态信息,并扩展范围以包括各种生理参数,如心率、血压等IBIDEM项目将使用摄像头视像头搭建视频手机、移动摄像头视图的机动系统以及显示传输图像的液晶视频手机对听障人和远程监控都有用,视频手机设计时,聋人和重听社区成员将积极参与,并表现为听力残疾者或听力残疾者以及使用音视频信息远程监控健康状况者之间的人际通信
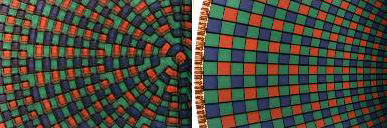
色版芯片通过滤波微定位获取单色布局不同的布局先通过模拟测试后再通过物理实现测试右侧显示微滤镜最佳模式
-
-

图像从SVAVISCA传感器获取
-
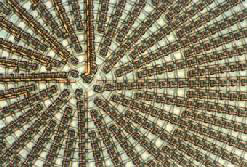
像素布局与IBIDEM视网膜相同,由8 013像素前缀排列组成
-
向传感器左侧和外围部分显示传感器表面图


















