- 提供配置文件
- 我们的目标是开发技术 新一代信息基础 计算机视觉 机器人学人工智能
视频1-6:版权教授大阪大学石浦公司- 所有权利保留
视频7-14:版权ATR智能机器人实验室-所有权利保留
产品组合
Android科学:努力开发认知科学新方法
- 外观和行为都是人形机器人开发中的重要问题设计机器人外观 特别是人形设计 一直是工业设计师的角色解决外观行为问题需要两种方法:一是机器人方法,二是认知科学方法。机器人方法试图构建人性化机器人 基础知识认知科学认知科学方法使用机器人验证假设理解人我们称它跨学科框架droid科学.
-

整合科学和工程
-

不可思义谷
- 安卓科学中的一个基本问题就是 奇异谷的存在机器人看起来更人性化, 似乎更熟悉, 直到点达到 微小缺陷产生奇异或易容感我们的重要作用是验证奇谷的存在并探索如何解决安卓奇谷问题
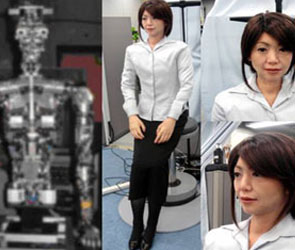
Androids: ReplieQ1Expo:ReplieeQ2:
- ReplieeQ2升级版ReplieeQ1ReplieeQ2脸部变得更人性化此外,它有13DFs头部制作面部表达式和口形ReplieeQ2以ReplieeQ1exto名在2005年6月日本爱知世界博览会上展示Repliee Q1exto模仿电视访问者与人交互Repliee Q1Exto有全向摄像头和麦克风环绕着她并触摸传感器嵌入地毯下,并可识别个人的手势、声音和立方姿势
-
Repliee问题2
- 成人安卓:它有42个空气驱动器外观通过复制人实现
-
Repliee问题2
- 自由度:
- 视线3
- 脸部:眉线:x1,眼线:x1,Cheeks:x1
- 口语7
- 内核3
- 武器9x2
- 指针2x2
- 托索:4
-

Repliee问题2
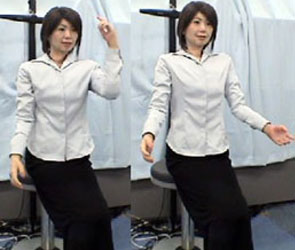
- 成人变形表达式:42个驱动器中13个用于头部人式面部表达方式通过目口运动实现
Repliee问题1“成人型安卓
- 日常生活中自然与人通信是人形机器人最重要的功能之一我们认为人性化外观和运动非常重要人形机器人有这些特性被称为Android
安卓需要拥有与人相同的运动机制 来执行人性运动如果Android拥有这种机制,则很难与人性化外观相平衡。与KOKORO公司协作开发ReplieeQ1ReplieeQ1外观人性化和上体自由度为31度,因此Android可复制人性运动ReplieeQ1博览会提升到41度自由度,允许更多人式运动所有关节均由空控器控制空气驱动器有阻塞特征, 所以我们可以软控制droid不受守法控制
-

ReplieeQ1:自然通信
-

Repliee问题1:外观触摸
- ReplieeQ1皮肤由硅胶制成,所以外观和触摸像人高敏感皮肤传感器使用压电元件,附11位眉部 脸部 肩部 上臂 前臂 手掌传感器可按修改速度输出值,因此安卓可视触摸方式以各种方式响应
-

Repliee问题1:自由度
- 自由度:
Androids: Android机器人外观像人形R1
- 外观运动对机器人给人留下的印象很重要 人与机器人通信时使用现有机器人时,很难测量外观或运动是否更重要使用人形机器人 单研究运动效果 并研究外观效果
- 安卓脑九度自由她可以移动眼睛 眼皮 嘴和脖子
- 人体覆盖硅胶, 皮肤感觉像人
- 皮肤下有4高敏感皮肤传感器
-

ReplieeR1
- Android机器人详细看起来像人, 因为这 Android机器人是用模型人造
-
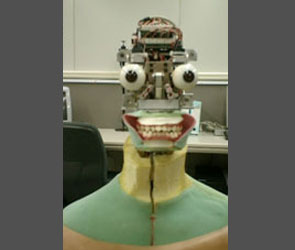
ReplieeR1
- 内部详细视图
-

ReplieeR1
- 皮肤由硅酮制成 内部由聚氨酯制成
Giminoi
- 适当的远程操作方法
有必要研究远程操作Android方法以传递“存在性”,这与移动机器人和工业机器人传统远程操作大相径庭。研究自主控制Android的方法 通过转移运算符运动 测量运动捕捉系统并调查自主控制视网膜小运动法
自然行为制作匹配语音操作
研究语言表达时如何产生自然行为 通过Android远程操作传输除语音表达时用词传递信息外,我们将研究非语言通信效果,不仅调查语音和嘴唇运动同步性,还调查面部表达式、头部甚至全身运动效果
理解并传输人的存在
由远程传输Sonzai-Kan效果调查,此外,我们将通过实验调查“何为存在”。举个例子,我们将研究droid能否通过比较人和android本身来代表人本身的权威
-
-
-
-
-
-


















