表面EMG电极(8mmAg-AgclBIOPAC-EL208S)通过粘盘附入对象皮肤测量EMB信号BipsBrachii和TricepsBrachi环管组放大器(BIOPAC-EMG100A)使用2000-5000范围增益因子获取信号(视题目而定)。EGG信号和加载单元信号由A/D分解器获取(科学求解实验室主12位内部PC卡),采样率为1khz,编码器信号由定制硬件计算整个数据集同时记录并存储,供后端脱机分析和模拟使用
专用实时软件操作系统用C写并运行在PC平台上软件由三大模块组成第一个模块处理硬件/软件接口控制个人机与外部电动机驱动器和传感器通过D/A和A/D卡交互第二模块包括MATLAB-Siminglink实时工具箱生成自动代码第三个模块是用户界面模块,允许设置各种运行时间运算参数所有模块编译并链接生成高效实时软件

表面EMG电极(8mmAg-AgclBIOPAC-EL208S)通过粘盘附入对象皮肤测量EMB信号BipsBrachii和TricepsBrachi环管组放大器(BIOPAC-EMG100A)使用2000-5000范围增益因子获取信号(视题目而定)。EGG信号和加载单元信号由A/D分解器获取(科学求解实验室主12位内部PC卡),采样率为1khz,编码器信号由定制硬件计算整个数据集同时记录并存储,供后端脱机分析和模拟使用
专用实时软件操作系统用C写并运行在PC平台上软件由三大模块组成第一个模块处理硬件/软件接口控制个人机与外部电动机驱动器和传感器通过D/A和A/D卡交互第二模块包括MATLAB-Siminglink实时工具箱生成自动代码第三个模块是用户界面模块,允许设置各种运行时间运算参数所有模块编译并链接生成高效实时软件

预测拟议研究将提高模拟人类肌肉及其数学配方领域当前知识知识将进一步用于创建小说HMI并使人们更好地了解神经层次人与机器人之间的交互作用此外,拟议研究将提供工具并基本理解开发辅助技术提高残疾人社区生活质量拟科学活动将促进电气工程、机械工程、生物工程和复健医学领域师生间协作
学习设计
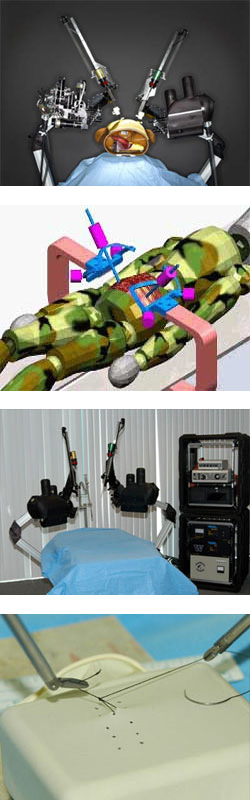
四年期项目包括四大并行任务,旨在实现上述目标。机制设计密切基于物理实战测量原型性能在实验和动物外科中评价,范围包括对容器的创伤控制、毒理学、组织焊接、调试和对容器伤害修复包括:侧切容器、净割容器、破碎容器、断层间隔破裂容器
关联军事健康问题
近十年来机器人辅助外科概念从高级DARPA资助的原型转至FDA核准的商业技术国防部原创部署战死护理仍不可能实现今日商业和研究外科机器人太大,无法安装进车辆我们拟设计方法通过两个新方面大幅减少现有商业和研究外科机器人的军事劣势1)机械设计需求将出自我们对实战外科量测,以免系统设计超能力2和2,我们将启动点移近外科网站--大幅度减量和权重同时平滑并加速运动响应允许外科机器人首次在前方部署装甲运兵车拥挤空间中救人
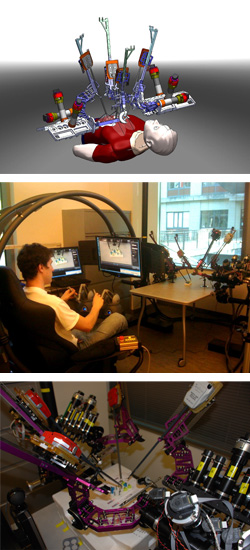
远程操作研究
乌鸦像外科机器人平台 广度部署于极端环境 远程操作它形成大距离 同时使用有线无线通信通道


两种机制配有三类传感器:(一)定位传感器(多转电压计-MidoriAmericaCorp.)归并到四个机制联合点中,测量位置、方向和翻译附属两台仪器内分解工具双线性电压计附工具控件三轴感应器(ATI-Mini感应器)位于直角工具轴近端,并插入工具控柄以测量手/工具接口抓取力和(三)接触感应器提供工具/问题二分联系BluedragONs传感器测量的数据使用212位国家工具USBA/D卡采样26Hz除数据采集外,同步视图外科切入图形用户界面实时显示数据