

计算学习机控实验室研究焦点领域为感官控制学习神经计算神经计算尝试将生物知识与物理和工程知识相结合,以发展对复杂系统信息处理的更基础和正式理解


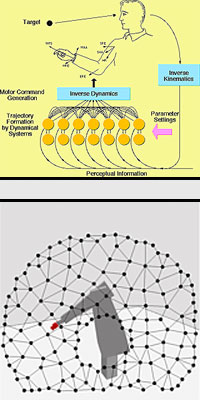

受分析动态结果启发后,我们与协作者Firdaus Udwadia(航空航天机械工程部)一起引入新式控制架构架构允许从独有即时成本优化控制角度推导新老控制法(例如操作空间控制法)。我们目前正在努力泛泛化框架,使框架成为学习框架
非线性控制技术解决操作空间任务实现问题,同时保持冗余自由度间协调:对高冗余机器人来说特别具有挑战性的问题,像人形.除研究7-DOF操作程序的传统和新冗余解决机制外,我们正在调查操作空间控制技术,以此作为重力中心定位平衡的一种手段腿平台.


双步目标偏移协议中,我们调查意外新目标如何改变当前离散运动文献中趣味观察有:运动初始方向、向第二个目标运动空间路径和第二运动速度放大实验数据显示,上述属性受运动反应时间和插图间距影响在当前研究中,我们使用DMP模拟大量文献目标切换实验数据并显示在线校正和观察目标切换现象可以通过改变持续DMP目标状态实现,而无需切换运动原语或重规划运动
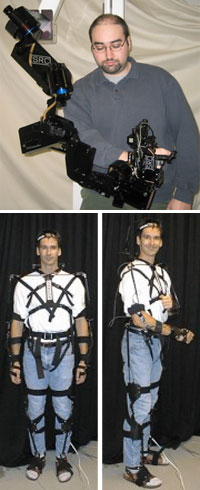
单项和二项联合实验中 离散和节奏运动先前单联运任务研究确定了两种度量交互:1)启动离散运动叠加持续节奏运动受特定相位窗口约束;2)持续节流运动中断离散启动过程,即相位重构我们研究的目标是确定交互发生在更高脑部(即规划)或下肌肉/侧面(即规划)或下肌肉/侧面(即执行级心理物理实验中,我们用Sensit记录联合角位置,同时执行有节奏和离散任务使用简化脊髓模型 研究离散和节奏运动