
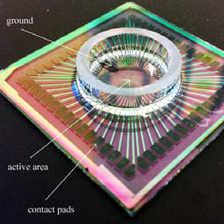
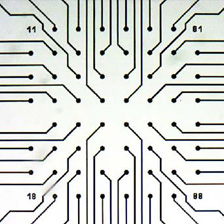
系统工程学院开工项目中,CIRG成员通过电极阵列将计算机与神经元成形相接,目的是让文化学习控制移动机器人这可能在理解神经元和神经元网络功能和开发过程方面大步前进,并帮助我们理解生物机制支持内存或学习等基本特性Animat也可以构成一个可行和道德上更容易接受的神经病调查平台,如阿尔茨海默氏病或Parkinson病,最终可用于测试新药理学处理并可能导致创建真正自主机器人, 并可在排除常人干预的条件下部署,深入空间探索
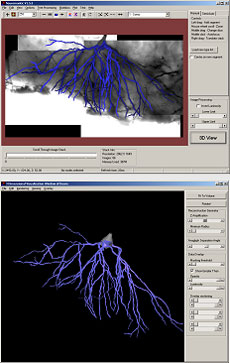
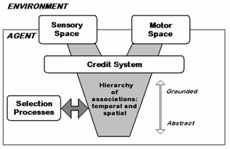
神经元单元控制架构通常期望机器人智能控制机制是计算机系统生物神经网络被培养训练成交互真实世界机器人的脑 — — 从而要么完全替换或协同操作计算机系统研究神经系统可清晰了解生物神经结构,因此这种研究立即产生医学影响具体地说,使用鼠类初级分解神经元网络控制移动`anmats'
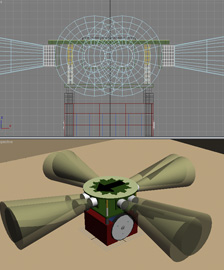
人工动物缩水 是一种新颖方法 发现生物神经元网络计算能力互不关联文化需要以某种形式适当化形,以便能够在受控环境中进行适当开发,在此环境中可以通过感官数据接收适当的刺激力,但最终对运动动作保留有影响。当前研究的主要目的是评估分立神经网络的计算和学习能力,以期提高网络水平处理人工神经网络创建人工混合系统(人工混合系统)已接近此点animat闭环控制移动机器人闭合循环环境交互作用
源码 :
公元前希达斯市诺科特华威克市华利市纳苏托市贝塞拉市哈蒙德JDowns和S马歇尔,“神经细胞控制架构”,高级机器人学区-2008年欧洲机器人学专题讨论会记录44页23-31,2008




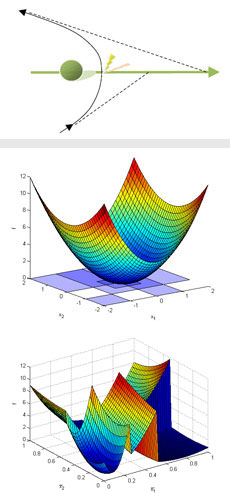

电脑图分析
时间段上不同点测量电源允许推理脑电源电脑图动态变化 大型神经元库活动同步模式 似乎含有实用信息 说明大脑认知处理状态 及其健康状况CIRG研究集中于同步模式特征化新手法,并应用这些新手法早期诊断内存缺陷此类研究极感兴趣,因为它描述基本认知过程,还因为它具有早期诊断痴呆症的实际潜力。与阅读大学心理学应用语言学院和德国马格德堡大学协作继续开展这项研究。与心理学应用语言学学院协作的新项目以EEG分析项目成功BCI应用和内存功能为基础,集中研究EEG语言处理特征特征特征特征而无需平均多试这一点极为重要,因为标准平均法可能掩蔽脑中信息处理的重要特征,而且极不最优诊断对象几乎按定义将具体面向脑损伤与巴西Uberlandia大学协作,从监听道初级阶段对EEG相似信号特征的研究可能有助于从业者早期诊断听障或诊断听波道肿瘤